Graph Execution Framework (GXF)
Holoscan GXF applications are built as compute graphs, based on GXF. This design provides modularity at the application level since existing entities can be swapped or updated without needing to recompile any extensions or application.
Those are the key terms used throughout this guide:
Each node in the graph is known as an entity
Each edge in the graph is known as a connection
Each entity is a collection of components
Each component performs a specific set of subtasks in that entity
The implementation of a component’s task is known as a codelet
Codelets are grouped in extensions
Similarly, the componentization of the entity itself allows for even more isolated changes. For example, if in an entity we have an input, an output, and a compute component, we can update the compute component without changing the input and output.
At its core, GXF provides a very thin API with a plug-in model to load in custom extensions. Applications built on top
of GXF are composed of components. The primary component is a Codelet that provides an interface for
start(), tick(), and stop() functions. Configuration parameters are bound within the
registerInterface() function.
In addition to the Codelet class, there are several others providing the underpinnings of GXF:
Scheduler and Scheduling Terms: components that determine how and when the tick() of a Codelet executes. This can be single or multithreaded, support conditional execution, asynchronous scheduling, and other custom behavior.
Memory Allocator: provides a system for up-front allocating a large contiguous memory pool and then re-using regions as needed. Memory can be pinned to the device (enabling zero-copy between Codelets when messages are not modified) or host or customized for other potential behavior.
Receivers, Transmitters, and Message Router: a message passing system between Codelets that supports zero-copy.
Tensor: the common message type is a tensor. It provides a simple abstraction for numeric data that can be allocated, serialized, sent between Codelets, etc. Tensors can be rank 1 to 7 supporting a variety of common data types like arrays, vectors, matrices, multi-channel images, video, regularly sampled time-series data, and higher dimensional constructs popular with deep learning flows.
Parameters: configuration variables that specify constants used by the Codelet loaded from the application yaml file modifiable without recompiling.
Let us look at an example of a Holoscan entity to try to understand its general anatomy. As an example let’s start with the entity definition for an image format converter entity named format_converter_entity as shown below.
Listing 20 An example GXF Application YAML snippet
%YAML 1.2
---
# other entities declared
---
name: format_converter_entity
components:
- name: in_tensor
type: nvidia::gxf::DoubleBufferReceiver
- type: nvidia::gxf::MessageAvailableSchedulingTerm
parameters:
receiver: in_tensor
min_size: 1
- name: out_tensor
type: nvidia::gxf::DoubleBufferTransmitter
- type: nvidia::gxf::DownstreamReceptiveSchedulingTerm
parameters:
transmitter: out_tensor
min_size: 1
- name: pool
type: nvidia::gxf::BlockMemoryPool
parameters:
storage_type: 1
block_size: 4919040 # 854 * 480 * 3 (channel) * 4 (bytes per pixel)
num_blocks: 2
- name: format_converter_component
type: nvidia::holoscan::formatconverter::FormatConverter
parameters:
in: in_tensor
out: out_tensor
out_tensor_name: source_video
out_dtype: "float32"
scale_min: 0.0
scale_max: 255.0
pool: pool
---
# other entities declared
---
components:
- name: input_connection
type: nvidia::gxf::Connection
parameters:
source: upstream_entity/output
target: format_converter/in_tensor
---
components:
- name: output_connection
type: nvidia::gxf::Connection
parameters:
source: format_converter/out_tensor
target: downstream_entity/input
---
name: scheduler
components:
- type: nvidia::gxf::GreedyScheduler
Above:
The entity
format_converter_entityreceives a message in itsin_tensormessage from an upstream entityupstream_entityas declared in theinput_connection.The received message is passed to the
format_converter_componentcomponent to convert the tensor element precision fromuint8tofloat32and scale any input in the[0, 255]intensity range.The
format_converter_componentcomponent finally places the result in theout_tensormessage so that its result is made available to a downstream entity (downstream_entas declared inoutput_connection).The
Connectioncomponents tie the inputs and outputs of various components together, in the above caseupstream_entity/output -> format_converter_entity/in_tensorandformat_converter_entity/out_tensor -> downstream_entity/input.The
schedulerentity declares aGreedyScheduler“system component” which orchestrates the execution of the entities declared in the graph. In the specific case ofGreedySchedulerentities are scheduled to run exclusively, where no more than one entity can run at any given time.
The YAML snippet above can be visually represented as follows.
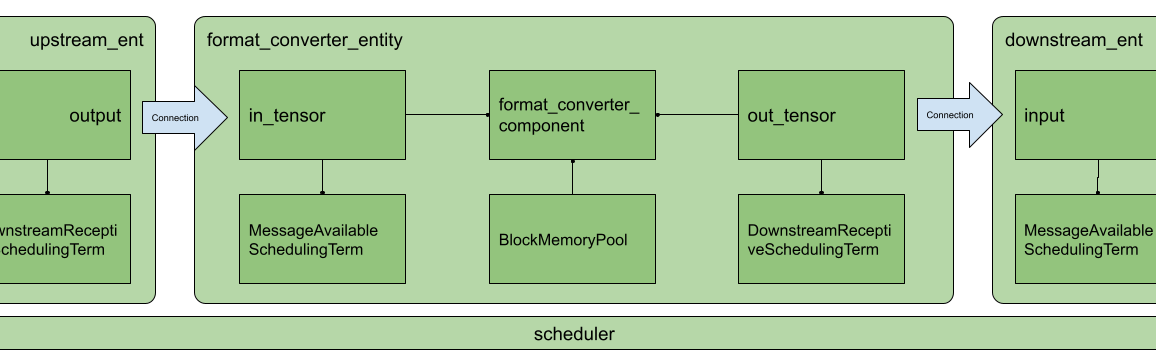
Fig. 25 Arrangement of components and entities in a Holoscan application
In the image, as in the YAML, you will notice the use of MessageAvailableSchedulingTerm, DownstreamReceptiveSchedulingTerm, and BlockMemoryPool. These are components that play a “supporting” role to in_tensor, out_tensor, and format_converter_component components respectively. Specifically:
MessageAvailableSchedulingTermis a component that takes aReceiver`` (in this caseDoubleBufferReceivernamedin_tensor) and alerts the graphExecutorthat a message is available. This alert triggersformat_converter_component`.DownstreamReceptiveSchedulingTermis a component that takes aTransmitter(in this caseDoubleBufferTransmitternamedout_tensor) and alerts the graphExecutorthat a message has been placed on the output.BlockMemoryPoolprovides two blocks of almost5MBallocated on the GPU device and is used byformat_converted_entto allocate the output tensor where the converted data will be placed within the format converted component.
Together these components allow the entity to perform a specific function and coordinate communication with other entities in the graph via the declared scheduler.
More generally, an entity can be thought of as a collection of components where components can be passed to one another to perform specific subtasks (e.g. event triggering or message notification, format conversion, memory allocation), and an application as a graph of entities.
The scheduler is a component of type nvidia::gxf::System which orchestrates the execution components in each entity at application runtime based on triggering rules.
Entities communicate with one another via messages which may contain one or more payloads. Messages are passed and received via a component of type nvidia::gxf::Queue from which both nvidia::gxf::Receiver and nvidia::gxf::Transmitter are derived. Every entity that receives and transmits messages has at least one receiver and one transmitter queue.
Holoscan uses the nvidia::gxf::SchedulingTerm component to coordinate data access and component orchestration for a Scheduler which invokes execution through the tick() function in each Codelet.
A SchedulingTerm defines a specific condition that is used by an entity to let the scheduler know when it’s ready for execution.
In the above example, we used a MessageAvailableSchedulingTerm to trigger the execution of the components waiting for data from in_tensor receiver queue, namely format_converter_component.
Listing 21 MessageAvailableSchedulingTerm
- type: nvidia::gxf::MessageAvailableSchedulingTerm
parameters:
receiver: in_tensor
min_size: 1
Similarly, DownStreamReceptiveSchedulingTerm checks whether the out_tensor transmitter queue has at least one outgoing message in it. If there are one or more outgoing messages, DownStreamReceptiveSchedulingTerm will notify the scheduler which in turn attempts to place the message in the receiver queue of a downstream entity. If, however, the downstream entity has a full receiver queue, the message is held in the out_tensor queue as a means to handle back-pressure.
Listing 22 DownstreamReceptiveSchedulingTerm
- type: nvidia::gxf::DownstreamReceptiveSchedulingTerm
parameters:
transmitter: out_tensor
min_size: 1
If we were to draw the entity in Fig. 25 in greater detail it would look something like the following.
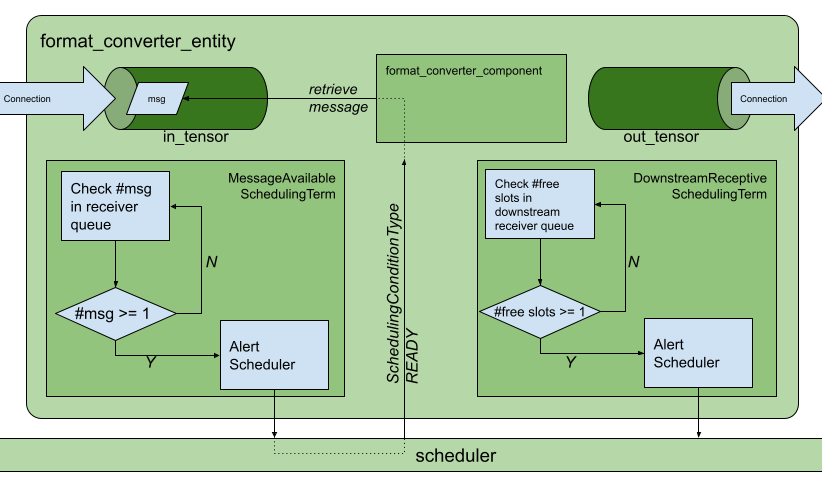
Fig. 26 Receive and transmit
Queues and
SchedulingTerms in entities.
Up to this point, we have covered the “entity component system” at a high level and showed the functional parts of an entity, namely, the messaging queues and the scheduling terms that support the execution of components in the entity. To complete the picture, the next section covers the anatomy and lifecycle of a component, and how to handle events within it.
Please follow Developing Holoscan GXF Extensions section first for a detailed explanation of the GXF extension development process.
For our application, we create the directory apps/my_recorder_app_gxf with the application definition file my_recorder_gxf.yaml. The my_recorder_gxf.yaml application is as follows:
Listing 23 apps/my_recorder_app_gxf/my_recorder_gxf.yaml
%YAML 1.2
---
name: replayer
components:
- name: output
type: nvidia::gxf::DoubleBufferTransmitter
- name: allocator
type: nvidia::gxf::UnboundedAllocator
- name: component_serializer
type: nvidia::gxf::StdComponentSerializer
parameters:
allocator: allocator
- name: entity_serializer
type: nvidia::holoscan::stream_playback::VideoStreamSerializer # inheriting from nvidia::gxf::EntitySerializer
parameters:
component_serializers: [component_serializer]
- type: nvidia::holoscan::stream_playback::VideoStreamReplayer
parameters:
transmitter: output
entity_serializer: entity_serializer
boolean_scheduling_term: boolean_scheduling
directory: "/workspace/test_data/endoscopy/video"
basename: "surgical_video"
frame_rate: 0 # as specified in timestamps
repeat: false # default: false
realtime: true # default: true
count: 0 # default: 0 (no frame count restriction)
- name: boolean_scheduling
type: nvidia::gxf::BooleanSchedulingTerm
- type: nvidia::gxf::DownstreamReceptiveSchedulingTerm
parameters:
transmitter: output
min_size: 1
---
name: recorder
components:
- name: input
type: nvidia::gxf::DoubleBufferReceiver
- name: allocator
type: nvidia::gxf::UnboundedAllocator
- name: component_serializer
type: nvidia::gxf::StdComponentSerializer
parameters:
allocator: allocator
- name: entity_serializer
type: nvidia::holoscan::stream_playback::VideoStreamSerializer # inheriting from nvidia::gxf::EntitySerializer
parameters:
component_serializers: [component_serializer]
- type: MyRecorder
parameters:
receiver: input
serializer: entity_serializer
out_directory: "/tmp"
basename: "tensor_out"
- type: nvidia::gxf::MessageAvailableSchedulingTerm
parameters:
receiver: input
min_size: 1
---
components:
- name: input_connection
type: nvidia::gxf::Connection
parameters:
source: replayer/output
target: recorder/input
---
name: scheduler
components:
- name: clock
type: nvidia::gxf::RealtimeClock
- name: greedy_scheduler
type: nvidia::gxf::GreedyScheduler
parameters:
clock: clock
Above:
The replayer reads data from
/workspace/test_data/endoscopy/video/surgical_video.gxf_[index|entities]files, deserializes the binary data to anvidia::gxf::TensorusingVideoStreamSerializer, and puts the data on an output message in thereplayer/outputtransmitter queue.The
input_connectioncomponent connects thereplayer/outputtransmitter queue to therecorder/inputreceiver queue.The recorder reads the data in the
inputreceiver queue, usesStdEntitySerializerto convert the receivednvidia::gxf::Tensorto a binary stream, and outputs to the/tmp/tensor_out.gxf_[index|entities]location specified in the parameters.The
schedulercomponent, while not explicitly connected to the application-specific entities, performs the orchestration of the components discussed in the Data Flow and Triggering Rules.
Note the use of the component_serializer in our newly built recorder. This component is declared separately in the entity
- name: entity_serializer
type: nvidia::holoscan::stream_playback::VideoStreamSerializer # inheriting from nvidia::gxf::EntitySerializer
parameters:
component_serializers: [component_serializer]
and passed into MyRecorder via the serializer parameter which we exposed in the extension development section (Declare the Parameters to Expose at the Application Level).
- type: MyRecorder
parameters:
receiver: input
serializer: entity_serializer
directory: "/tmp"
basename: "tensor_out"
For our app to be able to load (and also compile where necessary) the extensions required at runtime, we need to declare a CMake file apps/my_recorder_app_gxf/CMakeLists.txt as follows.
Listing 24 apps/my_recorder_app_gxf/CMakeLists.txt
list(APPEND APP_COMMON_EXTENSIONS
GXF::std
GXF::cuda
GXF::multimedia
GXF::serialization
)
create_gxe_application(
NAME my_recorder_gxf
YAML my_recorder_gxf.yaml
EXTENSIONS
${APP_COMMON_EXTENSIONS}
my_recorder
stream_playback
)
# Support automatic datasets download at build time
# Create a CMake target for the my recorder test
add_custom_target(my_recorder_gxf ALL)
# Download the associated dataset if needed
if(HOLOSCAN_DOWNLOAD_DATASETS)
add_dependencies(my_recorder_gxf endoscopy_data)
endif()
In the declaration of create_gxe_application we list:
my_recordercomponent declared in the CMake file of the extension development section under theEXTENSIONSargumentthe existing
stream_playbackHoloscan extension which reads data from disk
We also create a dependency between my_recorder_gxf and endoscopy_data targets so that it downloads endoscopy test data when building the application.
To make our newly built application discoverable by the build, in the root of the repository, we add the following line
add_subdirectory(my_recorder_app_gxf)
to apps/CMakeLists.txt.
We now have a minimal working application to test the integration of our newly built MyRecorder extension.
To run our application in a local development container:
Follow the instructions under the Using a Development Container section steps 1-5 (try clearing the CMake cache by removing the
buildfolder before compiling).You can execute the following commands to build
./run install_gxf ./run build # ./run clear_cache # if you want to clear build/install/cache folders
Our test application can now be run in the development container using the command
./apps/my_recorder_app_gxf/my_recorder_gxf
from inside the development container.
(You can execute
./run launchto run the development container.)@LINUX:/workspace/holoscan-sdk/build$ ./apps/my_recorder_app_gxf/my_recorder_gxf 2022-08-24 04:46:47.333 INFO gxf/gxe/gxe.cpp@230: Creating context 2022-08-24 04:46:47.339 INFO gxf/gxe/gxe.cpp@107: Loading app: 'apps/my_recorder_app_gxf/my_recorder_gxf.yaml' 2022-08-24 04:46:47.339 INFO gxf/std/yaml_file_loader.cpp@117: Loading GXF entities from YAML file 'apps/my_recorder_app_gxf/my_recorder_gxf.yaml'... 2022-08-24 04:46:47.340 INFO gxf/gxe/gxe.cpp@291: Initializing... 2022-08-24 04:46:47.437 INFO gxf/gxe/gxe.cpp@298: Running... 2022-08-24 04:46:47.437 INFO gxf/std/greedy_scheduler.cpp@170: Scheduling 2 entities 2022-08-24 04:47:14.829 INFO /workspace/holoscan-sdk/gxf_extensions/stream_playback/video_stream_replayer.cpp@144: Reach end of file or playback count reaches to the limit. Stop ticking. 2022-08-24 04:47:14.829 INFO gxf/std/greedy_scheduler.cpp@329: Scheduler stopped: Some entities are waiting for execution, but there are no periodic or async entities to get out of the deadlock. 2022-08-24 04:47:14.829 INFO gxf/std/greedy_scheduler.cpp@353: Scheduler finished. 2022-08-24 04:47:14.829 INFO gxf/gxe/gxe.cpp@320: Deinitializing... 2022-08-24 04:47:14.863 INFO gxf/gxe/gxe.cpp@327: Destroying context 2022-08-24 04:47:14.863 INFO gxf/gxe/gxe.cpp@333: Context destroyed.
A successful run (it takes about 30 secs) will result in output files (tensor_out.gxf_index and tensor_out.gxf_entities in /tmp) that match the original input files (surgical_video.gxf_index and surgical_video.gxf_entities under test_data/endoscopy/video) exactly.
@LINUX:/workspace/holoscan-sdk/build$ ls -al /tmp/
total 821384
drwxrwxrwt 1 root root 4096 Aug 24 04:37 .
drwxr-xr-x 1 root root 4096 Aug 24 04:36 ..
drwxrwxrwt 2 root root 4096 Aug 11 21:42 .X11-unix
-rw-r--r-- 1 1000 1000 729309 Aug 24 04:47 gxf_log
-rw-r--r-- 1 1000 1000 840054484 Aug 24 04:47 tensor_out.gxf_entities
-rw-r--r-- 1 1000 1000 16392 Aug 24 04:47 tensor_out.gxf_index
@LINUX:/workspace/holoscan-sdk/build$ ls -al ../test_data/endoscopy/video/
total 839116
drwxr-xr-x 2 1000 1000 4096 Aug 24 02:08 .
drwxr-xr-x 4 1000 1000 4096 Aug 24 02:07 ..
-rw-r--r-- 1 1000 1000 19164125 Jun 17 16:31 raw.mp4
-rw-r--r-- 1 1000 1000 840054484 Jun 17 16:31 surgical_video.gxf_entities
-rw-r--r-- 1 1000 1000 16392 Jun 17 16:31 surgical_video.gxf_index