The GXF Scheduler
The execution of entities in a graph is governed by the scheduler and the scheduling terms associated with every entity. A scheduler is a component responsible for orchestrating the execution of all the entities defined in a graph. A scheduler typically keeps track of the graph entities and their current execution states and passes them on to a nvidia::gxf::EntityExecutor component when ready for execution. The following diagram depicts the flow for an entity execution.
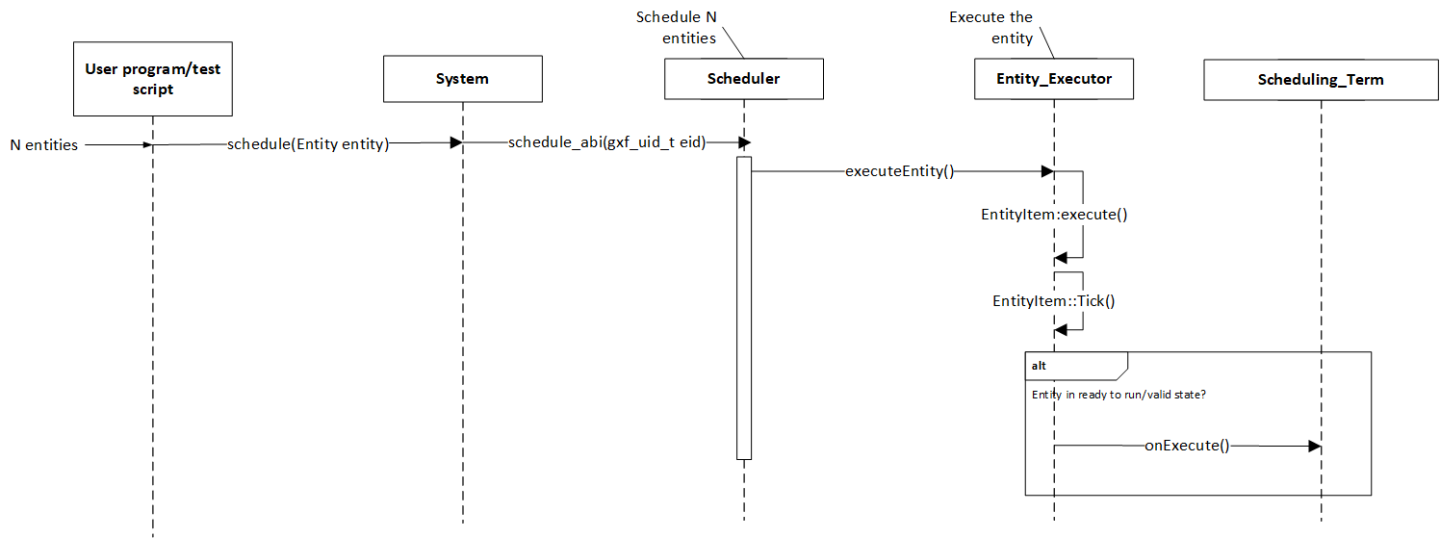
Figure: Entity execution sequence
As shown in the sequence diagram, the schedulers begin executing the graph entities via the nvidia::gxf::System::runAsync_abi() interface and continue this process until it meets the certain ending criteria. A single entity can have multiple codelets. These codelets are executed in the same order in which they were defined in the entity. A failure in execution of any single codelet stops the execution of all the entities. Entities are naturally unscheduled from execution when any one of their scheduling term reaches NEVER state.
Scheduling terms are components used to define the execution readiness of an entity. An entity can have multiple scheduling terms associated with it and each scheduling term represents the state of an entity using SchedulingCondition.
The table below shows various states of nvidia::gxf::SchedulingConditionType described using nvidia::gxf::SchedulingCondition.
SchedulingConditionType |
Description |
|---|---|
| NEVER | Entity will never execute again |
| READY | Entity is ready for execution |
| WAIT | Entity may execute in the future |
| WAIT_TIME | Entity will be ready for execution after specified duration |
| WAIT_EVENT | Entity is waiting on an asynchronous event with unknown time interval |
Schedulers define deadlock as a condition when there are no entities which are in READY, WAIT_TIME or WAIT_EVENT state which guarantee execution at a future point in time. This implies all the entities are in WAIT state for which the scheduler does not know if they ever will reach the READY state in the future. The scheduler can be configured to stop when it reaches such a state using the stop_on_deadlock parameter, else the entities are polled to check if any of them have reached READY state. max_duration configuration parameter can be used to stop execution of all entities regardless of their state after a specified amount of time has elapsed.
There are two types of schedulers currently supported by GXF
Greedy Scheduler
Multithread Scheduler
This is a basic single threaded scheduler which tests scheduling term greedily. It is great for simple use cases and predictable execution but may incur a large overhead of scheduling term execution, making it unsuitable for large applications. The scheduler requires a clock to keep track of time. Based on the choice of clock the scheduler will execute differently. If a Realtime clock is used the scheduler will execute in real-time. This means pausing execution - sleeping the thread, until periodic scheduling terms are due again. If a ManualClock is used scheduling will happen “time-compressed”. This means flow of time is altered to execute codelets in immediate succession.
The GreedyScheduler maintains a running count of entities which are in READY, WAIT_TIME and WAIT_EVENT states. The following activity diagram depicts the gist of the decision making for scheduling an entity by the greedy scheduler -

Figure: Greedy Scheduler Activity Diagram
Greedy Scheduler Configuration
The greedy scheduler takes in the following parameters from the configuration file
Parameter name |
Description |
|---|---|
| clock | The clock used by the scheduler to define the flow of time. Typical choices are RealtimeClock or ManualClock |
| max_duration_ms | The maximum duration for which the scheduler will execute (in ms). If not specified, the scheduler will run until all work is done. If periodic terms are present this means the application will run indefinitely |
| stop_on_deadlock | If stop_on_deadlock is disabled, the GreedyScheduler constantly polls for the status of all the waiting entities to check if any of them are ready for execution. |
Example usage - The following code snippet configures a Greedy scheduler with a ManualClock option specified.
name: scheduler
components:
- type: nvidia::gxf::GreedyScheduler
parameters:
max_duration_ms: 3000
clock: misc/clock
stop_on_deadlock: true
---
name: misc
components:
- name: clock
type: nvidia::gxf::ManualClock
The MultiThread scheduler is more suitable for large applications with complex execution patterns. The scheduler consists of a dispatcher thread which checks the status of an entity and dispatches it to a thread pool of worker threads responsible for executing them. Worker threads enqueue the entity back on to the dispatch queue upon completion of execution. The number of worker threads can be configured using worker_thread_number parameter. The MultiThread scheduler also manages a dedicated queue and thread to handle asynchronous events. The following activity diagram demonstrates the gist of the multithread scheduler implementation.
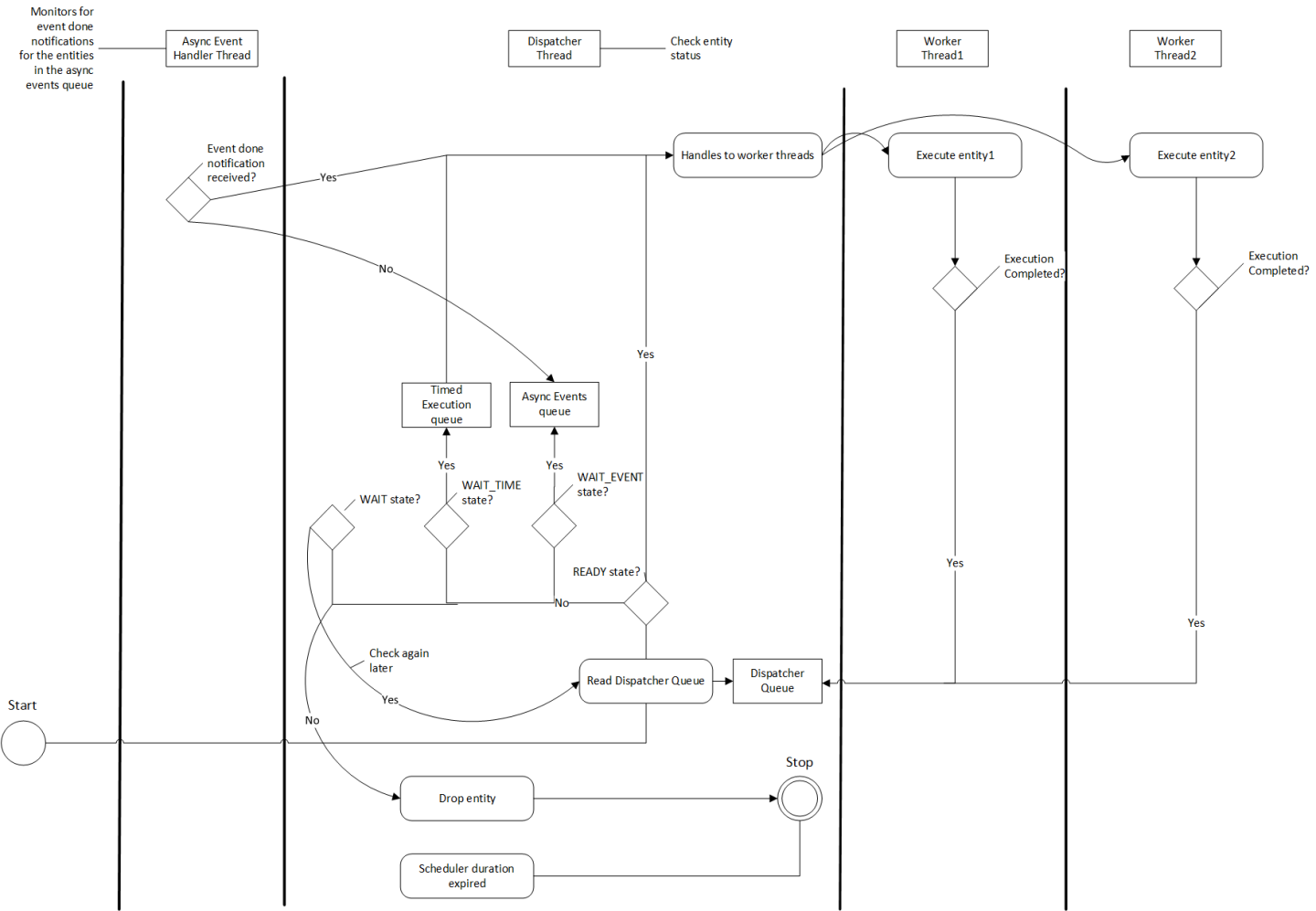
Figure: MultiThread Scheduler Activity Diagram
As depicted in the diagram, when an entity reaches WAIT_EVENT state, it’s moved to a queue where they wait to receive event done notification. The asynchronous event handler thread is responsible for moving entities to the dispatcher upon receiving event done notification. The dispatcher thread also maintains a running count of the number of entities in READY, WAIT_EVENT and WAIT_TIME states and uses these statistics to check if the scheduler has reached a deadlock. The scheduler also needs a clock component to keep track of time and it is configured using the clock parameter.
MultiThread scheduler is more resource efficient compared to the Greedy Scheduler and does not incur any additional overhead for constantly polling the states of scheduling terms. The check_recession_period_ms parameter can be used to configure the time interval the scheduler must wait to poll the state of entities which are in WAIT state.
Multithread Scheduler Configuration
The multithread scheduler takes in the following parameters from the configuration file
Parameter name |
Description |
|---|---|
| clock | The clock used by the scheduler to define the flow of time. Typical choices are RealtimeClock or ManualClock. |
| max_duration_ms | The maximum duration for which the scheduler will execute (in ms). If not specified, the scheduler will run until all work is done. If periodic terms are present this means the application will run indefinitely. |
| check_recess_period_ms | Duration to sleep before checking the condition of an entity again [ms]. This is the maximum duration for which the scheduler would wait when an entity is not yet ready to run. |
| stop_on_deadlock | If enabled the scheduler will stop when all entities are in a waiting state, but no periodic entity exists to break the dead end. Should be disabled when scheduling conditions can be changed by external actors, for example by clearing queues manually. |
| worker_thread_number | Number of threads. |
Example usage - The following code snippet configures a Multithread scheduler with the number of worked threads and max duration specified -
name: scheduler
components:
- type: nvidia::gxf::MultiThreadScheduler
parameters:
max_duration_ms: 5000
clock: misc/clock
worker_thread_number: 5
check_recession_period_ms: 3
stop_on_deadlock: false
---
name: misc
components:
- name: clock
type: nvidia::gxf::RealtimeClock
The Epoch scheduler is used for running loads in externally managed threads. Each run is called an Epoch. The scheduler goes over all entities that are known to be active and executes them one by one. If the epoch budget is provided (in ms), it would keep running all codelets until the budget is consumed or no codelet is ready. It might run over budget since it guarantees to cover all codelets in epoch. In case the budget is not provided, it would go over all the codelets once and execute them only once.
The epoch scheduler takes in the following parameters from the configuration file -
Parameter name |
Description |
|---|---|
| clock | The clock used by the scheduler to define the flow of time. Typical choice is a RealtimeClock. |
Example usage - The following code snippet configures an Epoch scheduler -
name: scheduler
components:
- name: clock
type: nvidia::gxf::RealtimeClock
- name: epoch
type: nvidia::gxf::EpochScheduler
parameters:
clock: clock
Note that the epoch scheduler is intended to run from an external thread. The runEpoch(float budget_ms); can be used to set the budget_ms and run the scheduler from the external thread. If the specified budget is not positive, all the nodes are executed once.
A SchedulingTerm defines a specific condition that is used by an entity to let the scheduler know when it’s ready for execution. There are various scheduling terms currently supported by GXF.
PeriodicSchedulingTerm
An entity associated with nvidia::gxf::PeriodicSchedulingTerm is ready for execution after periodic time intervals specified using its recess_period parameter. The PeriodicSchedulingTerm can either be in READY or WAIT_TIME state.
Example usage -
- name: scheduling_term
type: nvidia::gxf::PeriodicSchedulingTerm
parameters:
recess_period: 50000000
CountSchedulingTerm
An entity associated with nvidia::gxf::CountSchedulingTerm is executed for a specific number of times specified using its count parameter. The CountSchedulingTerm can either be in READY or NEVER state. The scheduling term reaches the NEVER state when the entity has been executed count number of times.
Example usage -
- name: scheduling_term
type: nvidia::gxf::CountSchedulingTerm
parameters:
count: 42
MessageAvailableSchedulingTerm
An entity associated with nvidia::gxf::MessageAvailableSchedulingTerm is executed when the associated receiver queue has at least a certain number of elements.
The receiver is specified using the receiver parameter of the scheduling term. The minimum number of messages that permits the execution of the entity is specified by min_size. An optional parameter for this scheduling term is front_stage_max_size, the maximum front stage message count. If this parameter is set, the scheduling term will only allow execution if the number of messages in the queue does not exceed this count. It can be used for codelets which do not consume all messages from the queue.
In the example shown below, the minimum size of the queue is configured to be 4. This means the entity will not be executed until there are at least 4 messages in the queue.
- type: nvidia::gxf::MessageAvailableSchedulingTerm
parameters:
receiver: tensors
min_size: 4
MultiMessageAvailableSchedulingTerm
An entity associated with nvidia::gxf::MultiMessageAvailableSchedulingTerm is executed when a list of provided input receivers combined have at least a given number of messages. The receivers parameter is used to specify a list of the input channels/receivers. The minimum number of messages needed to permit the entity execution is set by min_size parameter.
Consider the example shown below. The associated entity will be executed when the number of messages combined for all the three receivers is at least the min_size, i.e. 5.
- name: input_1
type: nvidia::gxf::test::MockReceiver
parameters:
max_capacity: 10
- name: input_2
type: nvidia::gxf::test::MockReceiver
parameters:
max_capacity: 10
- name: input_3
type: nvidia::gxf::test::MockReceiver
parameters:
max_capacity: 10
- type: nvidia::gxf::MultiMessageAvailableSchedulingTerm
parameters:
receivers: [input_1, input_2, input_3]
min_size: 5
BooleanSchedulingTerm
An entity associated with nvidia::gxf::BooleanSchedulingTerm is executed when its internal state is set to tick. The parameter enable_tick is used to control the entity execution. The scheduling term also has two APIs enable_tick() and disable_tick() to toggle its internal state. The entity execution can be controlled by calling these APIs. If enable_tick is set to false, the entity is not executed (Scheduling condition is set to NEVER). If enable_tick is set to true, the entity will be executed (Scheduling condition is set to READY). Entities can toggle the state of the scheduling term by maintaining a handle to it.
Example usage -
- type: nvidia::gxf::BooleanSchedulingTerm
parameters:
enable_tick: true
AsynchronousSchedulingTerm
AsynchronousSchedulingTerm is primarily associated with entities which are working with asynchronous events happening outside of their regular execution performed by the scheduler. Since these events are non-periodic in nature, AsynchronousSchedulingTerm prevents the scheduler from polling the entity for its status regularly and reduces CPU utilization. AsynchronousSchedulingTerm can either be in READY, WAIT, WAIT_EVENT or NEVER states based on asynchronous event it’s waiting on.
The state of an asynchronous event is described using nvidia::gxf::AsynchronousEventState and is updated using the setEventState API.
AsynchronousEventState |
Description |
|---|---|
| READY | Init state, first tick is pending |
| WAIT | Request to async service yet to be sent, nothing to do but wait |
| EVENT_WAITING | Request sent to an async service, pending event done notification |
| EVENT_DONE | Event done notification received, entity ready to be ticked |
| EVENT_NEVER | Entity does not want to be ticked again, end of execution |
Entities associated with this scheduling term most likely have an asynchronous thread which can update the state of the scheduling term outside of it’s regular execution cycle performed by the gxf scheduler. When the scheduling term is in WAIT state, the scheduler regularly polls for the state of the entity. When the scheduling term is in EVENT_WAITING state, schedulers will not check the status of the entity again until they receive an event notification which can be triggered using the GxfEntityEventNotify api. Setting the state of the scheduling term to EVENT_DONE automatically sends this notification to the scheduler. Entities can use the EVENT_NEVER state to indicate the end of its execution cycle.
Example usage -
- name: async_scheduling_term
type: nvidia::gxf::AsynchronousSchedulingTerm
DownsteamReceptiveSchedulingTerm
This scheduling term specifies that an entity shall be executed if the receiver for a given transmitter can accept new messages.
Example usage -
- name: downstream_st
type: nvidia::gxf::DownstreamReceptiveSchedulingTerm
parameters:
transmitter: output
min_size: 1
TargetTimeSchedulingTerm
This scheduling term permits execution at a user-specified timestamp. The timestamp is specified on the clock provided.
Example usage -
- name: target_st
type: nvidia::gxf::TargetTimeSchedulingTerm
parameters:
clock: clock/manual_clock
ExpiringMessageAvailableSchedulingTerm
This scheduling waits for a specified number of messages in the receiver. The entity is executed when the first message received in the queue is expiring or when there are enough messages in the queue. The receiver parameter is used to set the receiver to watch on. The parameters max_batch_size and max_delay_ns dictate the maximum number of messages to be batched together and the maximum delay from first message to wait before executing the entity respectively.
In the example shown below, the associated entity will be executed when the number of messages in the queue is greater than max_batch_size, i.e 5, or when the delay from the first message to current time is greater than max_delay_ns, i.e 10000000.
- name: target_st
type: nvidia::gxf::ExpiringMessageAvailableSchedulingTerm
parameters:
receiver: signal
max_batch_size: 5
max_delay_ns: 10000000
clock: misc/clock
AND Combined
An entity can be associated with multiple scheduling terms which define it’s execution behavior. Scheduling terms are AND combined to describe the current state of an entity. For an entity to be executed by the scheduler, all the scheduling terms must be in READY state and conversely, the entity is unscheduled from execution whenever any one of the scheduling term reaches NEVER state. The priority of various states during AND combine follows the order NEVER, WAIT_EVENT, WAIT, WAIT_TIME, and READY.
Example usage -
components:
- name: integers
type: nvidia::gxf::DoubleBufferTransmitter
- name: fibonacci
type: nvidia::gxf::DoubleBufferTransmitter
- type: nvidia::gxf::CountSchedulingTerm
parameters:
count: 100
- type: nvidia::gxf::DownstreamReceptiveSchedulingTerm
parameters:
transmitter: integers
min_size: 1
BTSchedulingTerm
A BT (Behavior Tree) scheduling term is used to schedule a behavior tree entity itself and its child entities (if any) in a Behavior tree.
Example usage -
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_codelet
type: nvidia::gxf::SequenceBehavior
parameters:
children: [ child1/child1_st ]
s_term: root_st
controller: root_controller