DOCA Firefly Service
NVIDIA DOCA Firefly Service Guide
This document provides instructions on how to use the DOCA Firefly Service container on top of NVIDIA® BlueField® DPU.
DOCA Firefly Service provides precision time protocol (PTP) based time syncing services to the BlueField DPU.
PTP is a protocol used to synchronize clocks in a network. When used in conjunction with hardware support, PTP is capable of sub-microsecond accuracy, which is far better than is what is normally obtainable with network time protocol (NTP). PTP support is divided between the kernel and user space. The ptp4l program implements the PTP boundary clock and ordinary clock. With hardware time stamping, it is used to synchronize the PTP hardware clock to the master clock.
Some of the features provided by Firefly require specific hardware BlueField DPU capabilities:
- PPS – requires special BlueField DPUs with PPS capabilities
- SyncE – requires special BlueField DPUs with SyncE capabilities
- PTP – supported by all BlueField DPUs
Note that failure to run PPS or SyncE due to missing hardware support is noted in the container output, but the container will continue to run the timing services it can provide on the provided hardware, such as PTP.
2.1. Firmware Version
Your firmware version must be 24.33.1048 or higher.
BlueField BSP Version
The supported BlueField image versions are 3.9.0 and higher.
2.3. Embedded Mode
2.3.1. Configuring Firmware Settings on DPU for Embedded Mode
- Set the DPU to embedded mode (default mode):
sudo mlxconfig -y -d 03:00.0 s INTERNAL_CPU_MODEL=1
- Enable the real time clock (RTC):
sudo mlxconfig -d 03:00.0 set REAL_TIME_CLOCK_ENABLE=1
-
Power cycle the DPU to apply the configuration.
-
You may check the DPU mode using the following command:
sudo mlxconfig -d 03:00.0 q | grep INTERNAL_CPU_MODEL # Example output INTERNAL_CPU_MODEL EMBEDDED_HOST(1)
2.3.2. Helper Scripts
Firefly's deployment contains a script to help with the configuration steps required for the network interface in embedded mode:
- scripts/doca_firefly/set_new_sf.sh
- scripts/doca_firefly/prepare_for_embedded_mode.sh
Both scripts are included as part of DOCA's container resource which can be downloaded according to the instructions in the NVIDIA DOCA Container Deployment Guide.
2.3.2.1. set_new_sf.sh
Creates a new trusted SF and marks it as "trusted". Script arguments:
- PCIe address
- SF number (checks if already exists)
- MAC address (if absent, a random address is generated)
Examples:
- Create SF with number "4" over port 0 of the DPU:
./set_new_sf.sh 0000:03:00.0 4
- Create SF with number "5" over port 0 of the DPU and a specific MAC address:
./set_new_sf.sh 0000:03:00.0 5 aa:bb:cc:dd:ee:ff
- Create SF with number "4" over port 1 of the DPU:
./set_new_sf.sh 0000:03:00.1 4
The first two examples should work out of the box for a BlueField-2 device and create SF4 and SF5 respectively.
2.3.2.2. prepare_for_embedded_mode.sh
This script automates all the steps mentioned in section Setting Up Network Interfaces for Embedded Mode and configures a freshly installed BFB image to the settings required by DOCA Firefly. Notes:
- The script deletes all previous OVS settings and creates a single OVS bridge that matches the definitions below
- The script should only be run once when connecting to the DPU for the first time or after a power cycle
- The only manual step required after using this script is configuring the IP address for the created network interface (step 5 in section Setting Up Network Interfaces for Embedded Mode)
Script arguments:
- SF number (checks if already exists)
Examples:
-
Prepare OVS settings using an SF indexed 4:
./prepare_for_embedded_mode.sh 4
Setting Up Network Interfaces for Embedded Mode
- Create a trusted SF to be used by the service according to the Scalable Function Setup Guide.
Note:
The following instructions assume that the SF has been created using index 4.
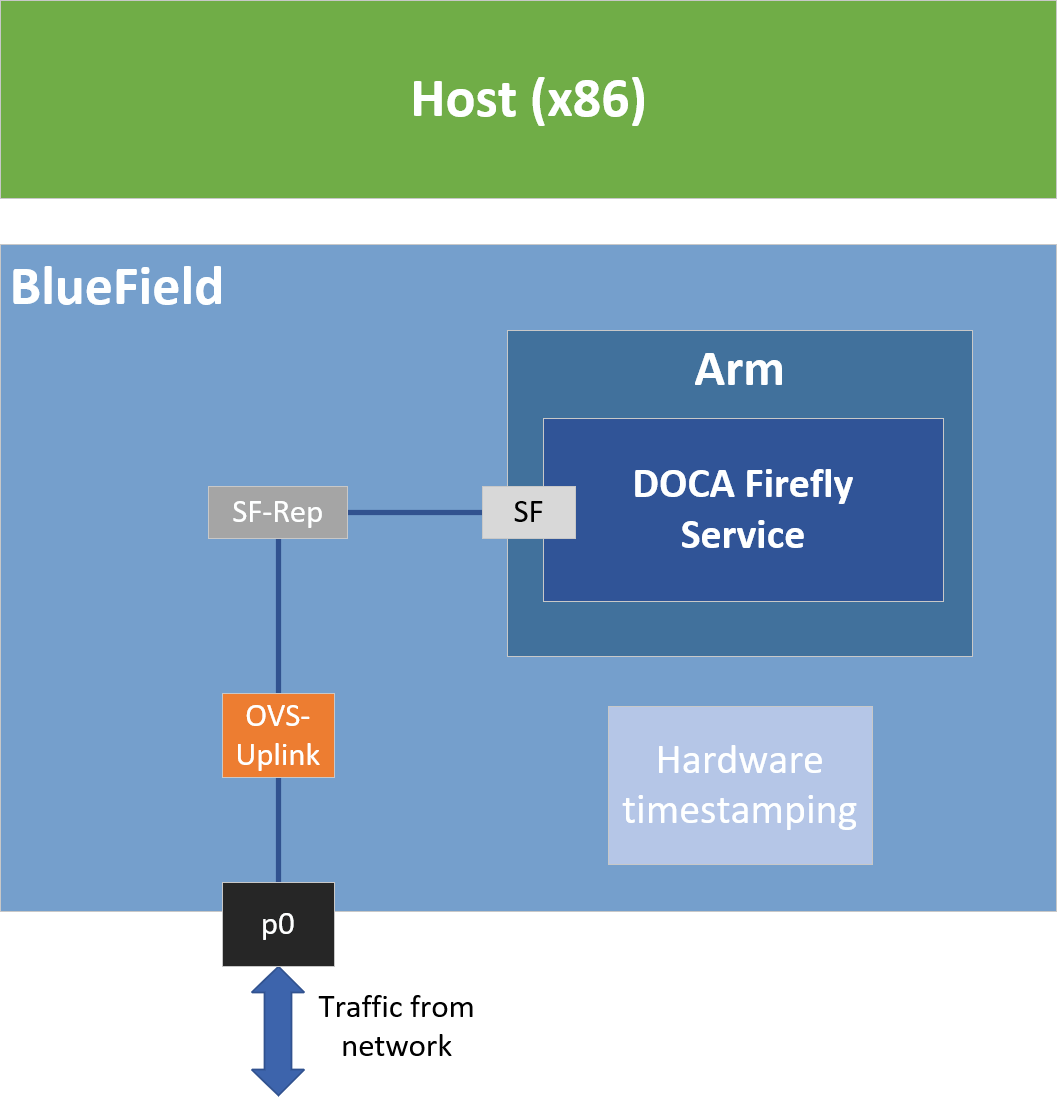
- Create the required OVS setting as is shown in the architecture diagram:
$ sudo ovs-vsctl add-br uplink $ sudo ovs-vsctl add-port uplink p0 $ sudo ovs-vsctl add-port uplink en3f0pf0sf4
Note:If traffic from the host is required as well, make sure to add the following port to the OVS bridge:
$ sudo ovs-vsctl add-port uplink pf0hpf
- Verify the OVS settings:
sudo ovs-vsctl show Bridge uplink Port uplink Interface uplink type: internal Port en3f0pf0sf4 Interface en3f0pf0sf4 Port p0 Interface p0
- Enable TX timestamping on the SF interface (not the representor):
# tx port timestamp offloading sudo ethtool --set-priv-flags enp3s0f0s4 tx_port_ts on
- Enable the interface and set an IP address for it:
# configure ip for the interface: sudo ifconfig enp3s0f0s4 <ip addr> up
- Configure OVS to support TX timestamping over this SF:
$ sudo ovs-vsctl set Bridge uplink mcast_snooping_enable=true $ sudo ovs-vsctl set Port en3f0pf0sf4 other_config:mcast-snooping-flood=true $ sudo ovs-vsctl set Port en3f0pf0sf4 other_config:mcast-snooping-flood-reports=true $ sudo tc filter add dev en3f0pf0sf4 protocol ipv4 parent ffff: prio 1000 flower ip_proto udp dst_port 319 skip_sw action mirred egress redirect dev p0 $ sudo tc filter add dev p0 protocol ipv4 parent ffff: prio 1000 flower ip_proto udp dst_port 319 skip_sw action mirred egress redirect dev en3f0pf0sf4 $ sudo tc filter add dev en3f0pf0sf4 protocol ipv4 parent ffff: prio 1000 flower ip_proto udp dst_port 320 skip_sw action mirred egress redirect dev p0 $ sudo tc filter add dev p0 protocol ipv4 parent ffff: prio 1000 flower ip_proto udp dst_port 320 skip_sw action mirred egress redirect dev en3f0pf0sf4
Note:If your OVS bridge uses a name other than
uplink, make sure that the used name is reflected in theovs-vsctl set Bridgecommand:$ sudo ovs-vsctl set Bridge <bridge-name> mcast_snooping_enable=true
2.4. Separated Mode
2.4.1. Configuring Firmware Settings on DPU for Separated Mode
- Set the DPU mode to "Separated":
sudo mlxconfig -y -d 03:00.0 s INTERNAL_CPU_MODEL=0
- Enable RTC:
sudo mlxconfig -d 03:00.0 set REAL_TIME_CLOCK_ENABLE=1
- Power cycle the DPU to apply the configuration.
- You may check the DPU mode using the following command:
sudo mlxconfig -d 03:00.0 q | grep INTERNAL_CPU_MODEL # Example output INTERNAL_CPU_MODEL SEPARATED_HOST(0)
Setting Up Network Interfaces for Separated Mode
- Make sure that that
p0is not connected to an OVS bridge:sudo ovs-vsctl show
- Enable TX timestamping on the
p0interface:# tx port timestamp offloading (assuming PTP interface is p0) sudo ethtool --set-priv-flags p0 tx_port_ts on
- Enable the interface and set an IP address for it:
# configure ip for the interface sudo ifconfig p0 <ip-addr> up
For more information about the deployment of DOCA containers on top of the BlueField DPU, refer to NVIDIA DOCA Container Deployment Guide.
DOCA Firefly service is available on NGC, NVIDIA's container catalog. Service-specific configuration steps and deployment instructions can be found under the service's container page.
The PTP program, linuxptp, has a configuration file that enables us to customize various PTP-related settings.
4.1. Default Config File
Each profile has its own base PTP configuration file. For example, the Media profile PTP configuration file is ptp4l-media.conf.
The default configuration files can be found in section PTP Profile Default Config Files.
4.2. Custom Config File
Instead of using a profile's base config file, users can create a file of their own.
To set a custom config file, users should locate their config file in the directory /etc/firefly and set the config file name in DOCA Firefly's YAML file.
For example, to set a custom linuxptp config file, the user can set the parameter PTP_CONFIG_FILE in the YAML file:
- name: PTP_CONFIG_FILE
value: my_custom_ptp.conf
In this example, my_custom_ptp.conf should be placed at /etc/firefly/my_custom_ptp.conf.
Overriding Specific Config File Parameters
Instead of replacing the entire config file, users may opt to override specific parameters. This can be done using the following variable syntax in the YAML file: CONF_<TYPE>_<SECTION>_<PARAMETER_NAME>.
- TYPE - currently only PTP is supported
- SECTION - the section in the config file that the parameter should be placed in
Note:
If the specified section does not already exist in the config file, a new section is created.
- PARAMETER_NAME - the config parameter name as should be placed in the config file
Note:
If the parameter name already exists in the config file, then the value is changed according to the value provided in the
.yamlfile. If the parameter name does not already exist in the config file, then it is added.
For example, the following variable in the YAML file definition changes the value of the parameter priority1 under section global in the PTP config file to 64.
- name: CONF_PTP_global_priority1
value: "64"
4.4. PTP Monitoring Configuration
DOCA Firefly contains an alpha feature for monitoring the PTP state during Firefly's execution. This feature could be activated using the following YAML lines:
- name: PTP_MONITOR
value: "active"
5.1. Providers
DOCA Firefly Service uses the following third-party providers to provide time syncing services:
- Linuxptp – PTP service, provided by the PTP4L program
- Testptp – PPS settings service
5.2. Profiles
DOCA Firefly Service includes profiles which represent common use cases for the Firefly service that provide a different default configuration per profile:
| Profiles | Media | Default |
|---|---|---|
| Purpose | Media productions | Any user requiring PTP |
| Content | PTP | PTP |
| PTP profile | SMPTE 2059-2 | PTP default profile |
| PPS in | Enabled | Enabled |
| PPS out | Enabled | Enabled |
| PTP client/server* | Client only | Both |
Client only is only relevant to a single PTP interface. If more than one PTP interface is provided in the YAML file, both modes are enabled.
5.3. Outputs
5.3.1. Container Output
The output of the DOCA Firefly Service container can be viewed using the following command:
crictl logs <CONTAINER-ID>
Where CONTANIER-ID can be retrieved using the following command:
sudo crictl ps
For example, in the following output, the container ID is 8f368b98d025b.
$ sudo crictl ps
CONTAINER IMAGE CREATED STATE NAME ATTEMPT POD ID POD
8f368b98d025b 289809f312b4c 2 seconds ago Running doca-firefly 0 5af59511b4be4 doca-firefly-some-computer-name
The output of the container depends on the services supported by the hardware and enabled via configuration and the profile selected. However, note that any of the configurations runs PTP, so when DOCA FireFly is running successfully expect to see the line Running ptp4l.
The following is an example of the expected container output when running the default profile on a DPU that supports PPS:
set pin function okay
PPS in set
set pin function okay
PPS out set
name mlx5_pps0 index 0 func 1 chan 0
name mlx5_pps1 index 1 func 2 chan 0
periodic output request okay
Running ptp4l
The following is an example of the expected container output when running the default profile on a DPU that does not support PPS:
PPS capability not found, seems that card doesn't supportcapabilities:
100000000 maximum frequency adjustment (ppb)
0 programmable alarms
0 external time stamp channels
0 programmable periodic signals
0 pulse per second
0 programmable pins
0 cross timestamping
Running ptp4l
5.3.2. Ptp4l Output
The ptp4l output can be found in the file /var/log/doca/firefly/ptp4l.log.
Example output:
ptp4l[95877.202]: selected /dev/ptp2 as PTP clock
ptp4l[95877.203]: port 1 (enp3s0f0s0): INITIALIZING to LISTENING on INIT_COMPLETE
ptp4l[95877.204]: port 0 (/var/run/ptp4l): INITIALIZING to LISTENING on INIT_COMPLETE
ptp4l[95877.204]: port 0 (/var/run/ptp4lro): INITIALIZING to LISTENING on INIT_COMPLETE
ptp4l[95884.191]: port 1 (enp3s0f0s0): LISTENING to MASTER on ANNOUNCE_RECEIPT_TIMEOUT_EXPIRES
ptp4l[95884.191]: selected local clock 021898.fffe.daee36 as best master
ptp4l[95884.191]: port 1 (enp3s0f0s0): assuming the grand master role
PPS capability not found, seems that card doesn't support
5.4. PTP Monitoring
Supported at alpha level only.
PTP monitoring periodically queries for various PTP-related information and prints it to the container's log. The following is a sample output of this tool:
gmIdentity: d26434.fffe.8f8345
master_offset: -8
gmPresent: true
ptp_stable: Recovered
UtcOffset: 37
timeTraceable: 0
frequencyTraceable: 0
grandmasterPriority1: 128
gmClockClass: 248
gmClockAccuracy: 0xfe
grandmasterPriority2: 127
gmOffsetScaledLogVariance: 0xffff
ptp_time: Tue Oct 18 08:45:23 2022
system_time: Tue Oct 18 08:45:23 2022
error_count: 1
last_err_time: Tue Oct 18 08:41:24 2022
Among others, this monitoring provides the following information:
- Details about the Grandmaster the DPU is syncing to
- Current PTP timestamp
- Health information such as connection errors during execution and whether they have been recovered from
PTP monitoring is disabled by default and can be activated by uncommenting the relevant lines as shown in the configuration section above. Once activated, the information can viewed from the container using the following command:
sudo crictl logs --tail=18 <CONTAINER-ID>
It is recommended to use the following watch command to actively monitor the PTP state:
sudo watch -n 1 crictl logs --tail=18 <CONTAINER-ID>
For general troubleshooting purposes, refer to NVIDIA DOCA Troubleshooting Guide.
For container-related troubleshooting, refer to the "Troubleshooting" section in the NVIDIA DOCA Container Deployment Guide. The following are additional troubleshooting tips for DOCA Firefly Service:
- If no pod is created, verify that your YAML is written correctly (see NVIDIA DOCA Troubleshooting Guide) and check the output of the following command:
sudo journalctl -u kubelet
- If the pod's STATE fails to be marked as
Ready(check usingcirctl pods), check if the container has run and exited:- Check the container's state:
sudo crictl ps -a
- If the container did exit, use the container's ID to check the log output by running:
sudo crictl logs <CONTAINER-ID>
- Check the container's state:
- If the error
custom config file not foundappears in the container log, check the custom file name written in the YAML file and make sure that you properly placed the file with that name under the/etc/firefly/directory. - If the error
profile <name> not supported. Abortingappears in the container log, verify that the profile you selected in the YAML file matches one of the optional profiles as listed in the profiles table. - If the message
PPS capability not found, seems that card doesn't supportappears in the container log, then the DPU hardware does not support PPS. However, PTP can still run on this HW and you should see the line "Running ptp4l" in the container log which indicatest that PTP is running successfully.
7.1. Media Profile
[global]
domainNumber 127
priority1 128
priority2 127
use_syslog 1
logging_level 6
tx_timestamp_timeout 30
hybrid_e2e 1
dscp_event 46
dscp_general 46
logAnnounceInterval -2
announceReceiptTimeout 3
logSyncInterval -3
logMinDelayReqInterval -3
delay_mechanism E2E
network_transport UDPv 4
boundary_clock_jbod 1
7.2. Default Profile
# This config file is based on linuxptp config file default.cfg[global]
#
# Default Data Set
#
twoStepFlag 1
clientOnly 0
socket_priority 0
priority1 128
priority2 128
domainNumber 0
#utc_offset 37
clockClass 248
clockAccuracy 0xFE
offsetScaledLogVariance 0xFFFF
free_running 0
freq_est_interval 1
dscp_event 0
dscp_general 0
dataset_comparison ieee1588
G.8275.defaultDS.localPriority 128
maxStepsRemoved 255
#
# Port Data Set
#
logAnnounceInterval 1
logSyncInterval 0
operLogSyncInterval 0
logMinDelayReqInterval 0
logMinPdelayReqInterval 0
operLogPdelayReqInterval 0
announceReceiptTimeout 3
syncReceiptTimeout 0
delay_response_timeout 0
delayAsymmetry 0
fault_reset_interval 4
neighborPropDelayThresh 20000000
serverOnly 0
G.8275.portDS.localPriority 128
asCapable auto
BMCA ptp
inhibit_announce 0
inhibit_delay_req 0
ignore_source_id 0#
# Run time options
#
assume_two_step 0
logging_level 6
path_trace_enabled 0
follow_up_info 0
hybrid_e2e 0
inhibit_multicast_service 0
net_sync_monitor 0
tc_spanning_tree 0
tx_timestamp_timeout 10
unicast_listen 0
unicast_master_table 0
unicast_req_duration 3600
use_syslog 1
verbose 0
summary_interval 0
kernel_leap 1
check_fup_sync 0
clock_class_threshold 248#
# Servo Options
#
pi_proportional_const 0.0
pi_integral_const 0.0
pi_proportional_scale 0.0
pi_proportional_exponent -0.3
pi_proportional_norm_max 0.7
pi_integral_scale 0.0
pi_integral_exponent 0.4
pi_integral_norm_max 0.3
step_threshold 0.0
first_step_threshold 0.00002
max_frequency 900000000
clock_servo pi
sanity_freq_limit 200000000
ntpshm_segment 0
msg_interval_request 0
servo_num_offset_values 10
servo_offset_threshold 0
write_phase_mode 0#
# Transport options
#
transportSpecific 0x0
ptp_dst_mac 01:1B:19:00:00:00
p2p_dst_mac 01:80:C2:00:00:0E
udp_ttl 1
udp6_scope 0x0E
uds_address /var/run/ptp4l
uds_ro_address /var/run/ptp4lro#
# Default interface options
#
clock_type OC
network_transport UDPv4
delay_mechanism E2E
time_stamping hardware
tsproc_mode filter
delay_filter moving_median
delay_filter_length 10
egressLatency 0
ingressLatency 0
# For multipule interfaces
boundary_clock_jbod 1#
# Clock description
#
productDescription ;;
revisionData ;;
manufacturerIdentity 00:00:00
userDescription ;
timeSource 0xA0
Notice
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation nor any of its direct or indirect subsidiaries and affiliates (collectively: “NVIDIA”) make no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assume no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.
Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.
THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.
Trademarks
NVIDIA, the NVIDIA logo, and Mellanox are trademarks and/or registered trademarks of Mellanox Technologies Ltd. and/or NVIDIA Corporation in the U.S. and in other countries. The registered trademark Linux® is used pursuant to a sublicense from the Linux Foundation, the exclusive licensee of Linus Torvalds, owner of the mark on a world¬wide basis. Other company and product names may be trademarks of the respective companies with which they are associated.
Copyright
© 2023 NVIDIA Corporation & affiliates. All rights reserved.