Application structure
Holoscan
applications are built by specifying sequences of operators. Connecting the output of
one operator to the input of another operator (via the add_flow API) configures
Holoscan’s pipeline and specifies when individual operators can run.
Holoscan sensor bridge leverages this framework by providing operators and objects that send and receive data in Holoscan applications. There are additional operators for converting application specific data (e.g. CSI-2 formatted video data) into formats that are acceptable inputs for other standard Holoscan operators. To see how a sensor bridge application works, we’ll step through the example IMX274 player.
The application in examples/imx274_player.py configures the following pipeline. When a loop through the pipeline finishes, execution restarts at the top, where new data is acquired and processed.
Fig. 1 IMX274 Player
RoceReceiverOpblocks until an end-of-frame UDP message is received. On return, the received frame data is available in GPU memory, along with metadata which is published to the application layer. Holoscan sensor bridge uses RoCE v2 to transmit data plane traffic over UDP; this is why the receiver is calledRoceReceiverOp.CsiToBayerOpis aware that the received data is a CSI-2 RAW10 image, which it translates into a bayer video frame. Each pixel color component in this image is decoded and stored as a uint16 value. For more information about RAW10, see the MIPI CSI-2 specification.ImageProcessorOpadjusts the received bayer image color and brightness to make it acceptable for display.BayerDemosaicOpconverts the bayer image data into RGBA.GammaCorrectionOpadjusts the luminance of the RGBA image to improve human perception.HolovizOpdisplays the RGBA image on the GUI.
For each step in the pipeline, the image data is stored in a buffer in GPU memory. Pointers to that data are passed between each element in the pipeline, avoiding expensive memory copies between host and GPU memory. GPU acceleration is used to perform each operator’s function, resulting in very low latency operation.
The Python imx274_player.py and C++ imx274_player.cpp files initialize the sensor
bridge device, camera, and pipeline in this way. To enhance readability, some details
are skipped–be sure and check the actual example code for more details.
import hololink as hololink_module
def main():
# Get handles to GPU
cuda.cuInit(0)
cu_device_ordinal = 0
cu_device = cuda.cuDeviceGet(cu_device_ordinal)
cu_context = cuda.cuDevicePrimaryCtxRetain(cu_device)
# Look for sensor bridge enumeration messages; return only the one we're looking for
channel_metadata = hololink_module.Enumerator.find_channel(channel_ip="192.168.0.2")
# Use that enumeration data to instantiate a data receiver object
hololink_channel = hololink_module.DataChannel(channel_metadata)
# Now that we can communicate, create the camera controller
camera = hololink_module.sensors.imx274.dual_imx274.Imx274Cam(hololink_channel, ...)
# Set up our Holoscan pipeline
application = HoloscanApplication(cu_context, cu_device_ordinal, camera, hololink_channel, ...)
application.config(...)
# Connect and initialize the sensor bridge device
hololink = hololink_channel.hololink()
hololink.start() # Establish a connection to the sensor bridge device
hololink.reset() # Drive the sensor bridge to a known state
# Configure the camera for 4k at 60 frames per second
camera_mode = imx274_mode.Imx274_Mode.IMX274_MODE_3840X2160_60FPS
camera.setup_clock()
camera.configure(camera_mode)
# Run our Holoscan pipeline
application.run() # we don't usually return from this call.
hololink.stop()
#include <hololink/data_channel.hpp>
#include <hololink/enumerator.hpp>
#include <hololink/hololink.hpp>
int main(int argc, char** argv)
{
// Get handles to GPU
cuInit(0);
int cu_device_ordinal = 0;
CUdevice cu_device;
cuDeviceGet(&cu_device, cu_device_ordinal);
CUcontext cu_context;
cuCtxCreate(&cu_context, 0, cu_device);
// Look for sensor bridge enumeration messages; return only the one we're looking for
hololink::Metadata channel_metadata = hololink::Enumerator::find_channel(hololink_ip);
// Use that enumeration data to instantiate a data receiver object
hololink::DataChannel hololink_channel(channel_metadata);
// Import the IMX274 sensor module and the IMX274 mode
py::module_ imx274 = py::module_::import("hololink.sensors.imx274");
py::object Imx274Cam = imx274.attr("dual_imx274").attr("Imx274Cam");
// Now that we can communicate, create the camera controller
py::object camera = Imx274Cam("hololink_channel"_a = hololink_channel, ...);
// Set up our Holoscan pipeline
auto application = holoscan::make_application<HoloscanApplication>(...)
application->config(...)
// Connect and initialize the sensor bridge device
std::shared_ptr<hololink::Hololink> hololink = hololink_channel.hololink();
hololink->start(); // Establish a connection to the sensor bridge device
hololink->reset(); // Drive the sensor bridge to a known state
// Configure the camera for 4k at 60 frames per second
camera.attr("setup_clock")();
camera.attr("configure")(Imx274_Mode(0));
// Run our Holoscan pipeline
application->run(); // we don't usually return from this call.
hololink->stop();
}
Important details:
Enumerator.find_channelblocks the caller until an enumeration message that matches the given criteria is found. If no matching device is found, this method will time out (default 20 seconds) and raise an exception. Holoscan sensor bridge enumeration messages are sent once per second.Holoscan sensor bridge devices transmit enumeration messages for each data plane controller, which currently correspond directly with each sensor bridge Ethernet interface. If both interfaces on a device are connected to a host, the host will receive a pair of distinct enumeration messages, one for each data port, from the same sensor bridge device.
Enumeration messages are sent to the local broadcast address, and routers are not allowed to forward these local broadcast messages to other networks. You must have a local connection between the host and the sensor bridge device in order to enumerate it.
Enumerator.find_channelreturns a dictionary of name/value pairs containing identifying information about the data port being discovered, including MAC ID, IP address, versions of all the programmable components within the device, device serial number, and which specific instance this data port controller is within the device. While the IP address may change, the MAC ID, serial number, and data plane controller instance are constant. The host does not need to request any of the data included in this dictionary; its all broadcast by the sensor bridge device.DataChannelis the local controller for a data plane on the sensor bridge device. It contains the APIs for configuring the target addresses for packets transmitted on that data plane– this is used by the receiver operator, described below.In this example, the
cameraobject provides most of the APIs that the application layer would access. When the application configures the camera, the camera object knows how to work with the various sensor bridge controller objects to properly configureDataChannel.Usually there are multiple
DataChannelinstances on a singleHololinksensor bridge device, and many APIs on theHololinkdevice will affect all theDataChannelobjects on that same device. In this example, callinghololink.resetwill reset all the data channels on this device; and in the stereo IMX274 configuration, callingcamera.setup_clocksets the clock that is shared between both cameras. For this reason, it’s important that the application is careful about callingcamera.setup_clock–resetting the clock while a camera is running can lead to undefined states.
Holoscan, on the call to application.run, invokes the application’s compose method,
which includes this:
class HoloscanApplication(holoscan.core.Application):
def __init__(self, ..., camera, hololink_channel, ...):
...
self._camera = camera
self._hololink_channel = hololink_channel
...
def compose(self):
...
# Create the CSI to bayer converter.
csi_to_bayer_operator = hololink_module.operators.CsiToBayerOp(...)
# The call to camera.configure(...) earlier set our image dimensions
# and bytes per pixel. This call asks the camera to configure the
# converter accordingly.
self._camera.configure_converter(csi_to_bayer_operator)
# csi_to_bayer_operator now knows the image dimensions and bytes per pixel,
# and can compute the overall size of the received image data.
frame_size = csi_to_bayer_operator.get_csi_length()
# Create a receiver object that fills out our frame buffer. The receiver
# operator knows how to configure hololink_channel to send its data
# to us and to provide an end-of-frame indication at the right time.
receiver_operator = hololink_module.operators.RoceReceiverOp(
hololink_channel,
frame_size, ...)
...
# Use add_flow to connect the operators together:
...
# receiver_operator.compute() will be followed by csi_to_bayer_operator.compute()
self.add_flow(receiver_operator, csi_to_bayer_operator, {("output", "input")})
...
class HoloscanApplication : public holoscan::Application {
public:
explicit HoloscanApplication(..., py::object camera, hololink::DataChannel& hololink_channel, ...)
: ...
, camera_(camera)
, hololink_channel_(hololink_channel)
...
{
}
void compose() override
{
...
// Create the CSI to bayer converter.
auto csi_to_bayer_operator = make_operator<hololink::operators::CsiToBayerOp>(...);
// The call to camera.attr("configure")(...) earlier set our image dimensions
// and bytes per pixel. This call asks the camera to configure the
// converter accordingly.
camera_.attr("configure_converter")(csi_to_bayer_operator);
// csi_to_bayer_operator now knows the image dimensions and bytes per pixel,
// and can compute the overall size of the received image data.
const size_t frame_size = csi_to_bayer_operator->get_csi_length();
// Create a receiver object that fills out our frame buffer. The receiver
// operator knows how to configure hololink_channel to send its data
// to us and to provide an end-of-frame indication at the right time.
auto receiver_operator = make_operator<hololink::operators::RoceReceiverOp>(
holoscan::Arg("hololink_channel", &hololink_channel_),
holoscan::Arg("frame_size", frame_size), ...);
...
// Use add_flow to connect the operators together:
...
// receiver_operator.compute() will be followed by csi_to_bayer_operator.compute()
add_flow(receiver_operator, csi_to_bayer_operator, { { "output", "input" } });
...
}
private:
const py::object camera_;
hololink::DataChannel& hololink_channel_;
};
Some key points:
receiver_operatorhas no idea it is dealing with video data. It’s just informed of the memory region(s) to fill and the size of a block of data. When a complete block of data is received, the CPU will be notified so that pipeline processing can continue.Applications can pass in a frame buffer device memory pointer to the constructor for
receiver_opearator, or the receiver will allocate one for you. When it allocates a buffer, it can take into account special requirements for various configurations of GPU and RDMA controller.csi_to_bayer_operatoris aware of memory layout for CSI-2 formatted image data. Our call tocamera.configure_converterallows the camera to communicate the image dimensions and pixel depth; with that knowledge, the call tocsi_to_bayer_operator.get_csi_lengthcan return the size of the memory block necessary to manage these images. This memory size includes not only the image data itself, but CSI-2 metadata, and GPU memory alignment requirements. Because CsiToBayerOp is a GPU accelerated function, it may have special memory requirements that the camera sensor object is not aware of.receiver_operatorcoordinates withholoscan_channelto configure the sensor bridge data plane. Configuration automatically handles setting the sensor bridge device with our host Ethernet and IP addresses, destination memory addresses, security keys, and frame size information.To support RDMA, the receiver operator is given a single block of memory (instead of a memory pool to allocate from). The peripheral component is granted access to this region only, and that region does not change throughout the life of the sensor bridge application.
the sensor bridge device, following configuration by the
holoscan_channelobject, will start forwarding all received sensor data to the configured receiver. We haven’t instructed the camera to start streaming data yet, but at this point, we’re ready to receive it.receiver_operatorkeeps track of adeviceparameter, which in this application is our camera. Whenreceiver_operator.startis called, it will calldevice.start,which in our IMX274 implementation, will instruct the camera to begin streaming data.
In this example, receiver_operator is a RoceReceiverOp instance, which takes
advantage of the RDMA acceleration features present in the ConnectX firmware. With
RoceReceiverOp, the CPU only sees an interrupt when the last packet for the frame is
received–all frame data sent before that is written to GPU memory in the background. In
systems without ConnectX devices, LinuxReceiverOperator provides the same
functionality but uses the host CPU and Linux kernel to receive the ingress UDP
requests; and the CPU writes that payload data to GPU memory. This provides the same
functionality as RoceReceiverOp but at considerably lower performance.
A demonstration application where inference is used to generate a video overlay is included in examples/tao_peoplenet.py. The Tao PeopleNet is used to determine the locations of persons, bags, and faces in the live video stream. This example program draws bounding boxes on an overlay illustrating where those objects are detected in the video frame.
Pipeline structure:
Fig. 2 IMX274 Player with Inference
Adding inference to the video pipeline is easy: just add the appropriate operators and
data flows. In our case, we use the video mixer built in to HolovizOp to display the
overlay generated by inference. RoceReceiverOp is specified to always provide the most
recently received video frame, so if a pipeline takes more than one frame time to
complete, the next iteration through the loop will always work on the most recently
received video frame.
The Body Pose Estimation application takes input from a live video, performs inference using YOLOv8 pose model, and then shows keypoints overlayed onto the original video. The keypoints are:
[nose, left eye, right eye, left ear, right ear, left shoulder, right shoulder, left elbow, right elbow, left wrist, right wrist, left hip, right hip, left knee, right knee, left ankle, right ankle]
This application’s pipeline is the same as the People Detection application:
Fig. 3 Body Pose Estimation
The difference is that InferenceOp uses the YOLOv8 pose model and the post processor
operator has logic that performs postprocessing specific to the YOLOv8 model.
Specifically, it takes the output of Inference and filters out detections that have low
scores and applies non-max suppression (nms) before sending the output to HolovizOp.
Multiple receiver operators can be instantiated to support data feeds from multiple
cameras. In examples/stereo_imx274_player.py, the same pipeline for live video feed is
presented, except that it is instantiated twice, once for each camera on the IMX274
stereo camera board. In this case, Holoscan cycles between each pipeline, providing two
separate windows (one for each visualizer) on the display. Each receiver_operator
instance is independent and runs simultaneously.
This application demonstrates how to utilize the hololink GPIO interface and can be
found under the hololink/examples folder.
The hololink GPIO interface supports 16 GPIOs numbered 0…15. These GPIOs can be set as either input or output and have 2 logical values:
High - 3.3V can be measured on the GPIO pin
Low - 0V can b measured on the GPIO pin
The following image maps the GPIO and ground pins on the hololink board:
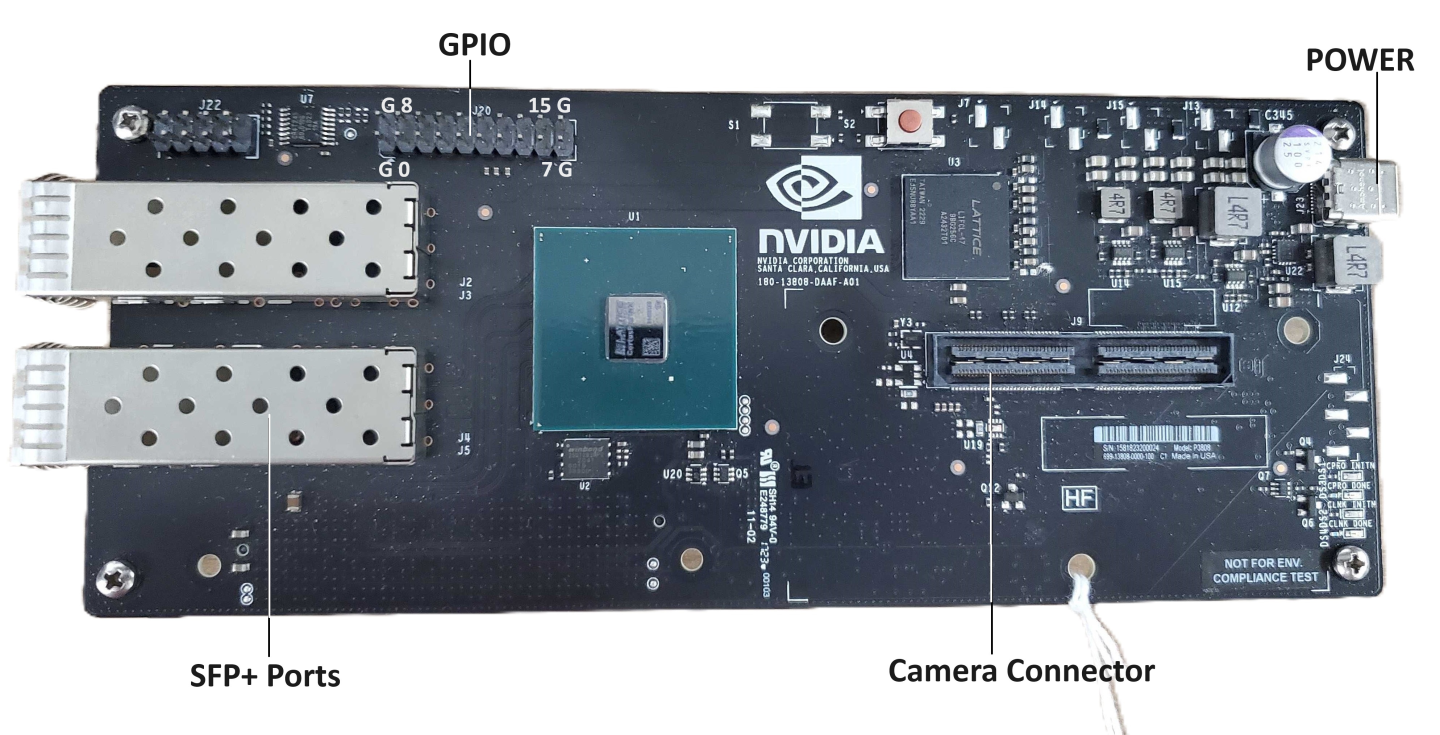
As can be observed from the image:
The 4 pins in the corners of the connector are ground pins (marked ‘G’ in the image above)
The lower set of pins between the 2 lower ground pins are GPIO pins numbered 0 to 7
The upper set of pins between the 2 upper ground pins are GPIO pins numbered 8 to 15
GPIO Example application flow
The GPIO Example is a simple application made up of 2 operators as can be seen in the following diagram:
Fig. 4 GPIO Example Flow
GPIO Set Operator - this operator sweeps through the 16 GPIO pins setting them one by one to values and directions defined per 5 different pin configurations:
ALL_OUT_L- All pins output low
ALL_OUT_H- All pins output high
ALL_IN - All pins input
ODD_OUT_H- Odd pins output high, even pins input
EVEN_OUT_H -Even pins output high, odd pins input
Each cycle of this operator configures one pin to a direction and value and sends the
last changed pin number and the current running configuration to the GPIO read
operator.
Once all 16 pins are set per the currently running configuration,the operator
will move on the next cycle to the next configuration.
GPIO Read Operator - This operator reads and displays the current value of the last configured pin. It delays 10 seconds to allow the user to validate the pin level and direction with an external measurement device like a multimeter or scope.
GPIO Software interface
The GPIO interface is a class defined within the hololink module. It exports the following GPIO interface:
get_gpio() - gets a GPIO interface instance from the hololink module
set_direction( pin, direction ) - sets the pin direction as input or output
get_direction( pin ) - gets the direction set for the pin
set_value( pin, value ) - for pins set as direction output, set the value of the pin to high or low.
get_value( pin ) - for pins set as direction input, reads the value of the pin (high or low).
pin numbers - range between 0 to 15.
pin direction - enumerated values: IN-1,OUT-0
pin values - enumerated values: HIGH-1,LOW-0
Jetson boards have built in support for ISP (Image Signal Processing) unit for processing Bayer images and outputting images in standard color space(s). The ISP is operational in Jetson Orin AGX and Orin IGX in iGPU configuration.
A sample ISP application presented in examples/linux_hwisp_player.py configures the
following pipeline. When a loop through the pipeline finishes, execution restarts at the
top, where new data is acquired and processed.
Fig. 5 Linux ISP Player
ArgusIspOp allows the users to access the ISP via Argus API. This operator takes in
Bayer uncompressd image of uint16 per pixel (MSB aligned) and outputs RGB888 image. It
is available as C++ operator with Python bindings.
The ArgusIspOp can be configured using following required parameters at the
application level. Below is a snippet from an existing python based example.
argus_isp = hololink_module.operators.ArgusIspOp(
self,
name="argus_isp",
bayer_format=bayer_format.value, # RGGB or other Bayer format
exposure_time_ms=16.67, # Exposure time in milliseconds. 60fps is 16.67ms
analog_gain=10.0, # Minimum Analog Gain
pixel_bit_depth=10, # Effective bit depth of input per pixel
pool=isp_pool,
)
The input to the ArgusIspOp is a Bayer Image uncompressed to uint16 per pixel. The
values in uint16 should be MSB aligned. For example, if the camera sensor produces
Raw10, the 10bits should be MSB aligned in 16bits. Currently supported output from
ArgusIspOp is RGB888 in Rec 709 standard color space and gamma corrected.
The glass to display latency of the pipeline mentioned above on Jetson Orin AGX is 37ms for a resolution of 1920x1080 at 60 fps.
Please reach out to NVIDIA for further questions on ISP capabilities and usage.