What Is Sim-to-Real?#
What Do I Need for This Module?
Nothing — this module is theory-only.
Learning Objectives#
By the end of this session, you’ll be able to:
Define sim-to-real transfer and its goals
Identify the four major categories of sim-to-real gaps
Explain why transfer is difficult even with high-fidelity simulation
Sim-to-Real Defined#
Sim-to-real refers to the process of training a policy in simulation and deploying it on real hardware. The goal is a policy that performs well in the real world despite being trained entirely (or primarily) in simulation.
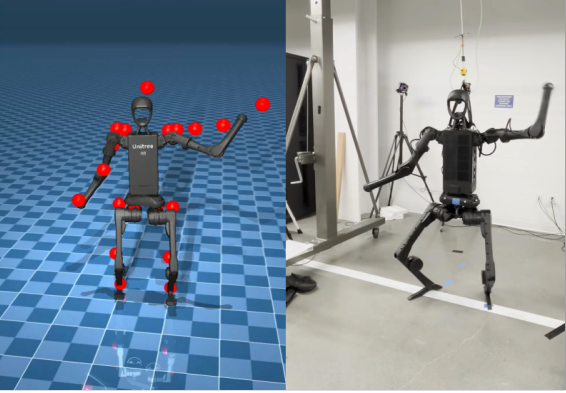
Sim-to-Real with Unitree H1#
The Sim-to-Real Gap#
The sim-to-real gap is the performance difference between simulation and reality. A policy achieving high success rates in simulation may perform significantly worse on real hardware.
Warning
The sim-to-real gap is often larger than expected. And while colloquially we may discuss “the gap” as if it’s a single entity, the gap is a complex combination of gaps in sensing, actuation, physics, and modeling.
Never assume a policy will “just work” on real hardware without systematic testing and iteration.
Sources of the Gap#
Sensing Gaps#
Camera models lack real sensor noise, blur, and distortion
Depth sensors have idealized measurements without artifacts
Simulated lighting differs from real lighting conditions
Actuation Gaps#
Motor models lack friction, backlash, and thermal effects
Joint dynamics are simplified
Control loop timing differs between simulation and hardware
Physics Gaps#
Contact dynamics (friction, restitution) are approximations
Deformable objects are difficult to simulate accurately
Fluid dynamics and granular materials are computationally expensive
Modeling Gaps#
CAD models differ from as-built hardware
Mass and inertia properties are estimates
What Makes Transfer Hard?#
The sim-to-real gap isn’t just about simulation fidelity. Even with perfect simulation, transfer is challenging because:
Distribution shift: Real-world conditions vary from training
Compounding errors: Small perception errors lead to large action errors
Unmodeled dynamics: Real physics has effects that may not be represented in simulation
Temporal differences: Real-time constraints affect behavior
Summary#
Gap Category |
Examples |
|---|---|
Sensing |
Camera noise, lighting, depth artifacts |
Actuation |
Friction, backlash, thermal effects |
Physics |
Contact dynamics, deformables |
Modeling |
CAD errors, mass/inertia estimates |
Understanding these gaps is essential—throughout this learning path, you’ll learn strategies to address each category.
What’s Next?#
Now that you understand the sim-to-real challenge, let’s learn about the tools we’ll use. In the next session, LeRobot: Background and Community, you’ll learn about the Hugging Face ecosystem for robotics.