cuBB Developer Guide#
Aerial CUDA-Accelerated RAN is a set of software defined libraries that are optimized to run 5G gNB workloads on GPU. These libraries include cuPHY, cuMAC and pyAerial. In this section, we focus on layer-1 (L1), or physical (PHY) layer of 5G gNB software stack as defined by 3GPP [1-5].
cuPHY is the 5G L1 library of the Aerial CUDA-Accelerated RAN. It is designed as an inline accelerator to run on NVIDIA GPUs and it does not require any additional hardware accelerator. It is implemented according to the O-RAN 7.2 split option [8]. cuPHY library takes advantage of massively parallel GPU architecture to accelerate computationally heavy signal processing tasks. It also makes use of fast GPU I/O interface between the NVIDIA Bluefield-3 (BF3) NIC and GPU (GPU Direct RDMA [7]) to improve the latency.
BF3 NIC provides the fronthaul (FH) connectivity in addition to the IEEE 1588 compliant timing synchronization. The BF3 NIC also has a built-in SyncE and eCPRI windowing functionality, which meets G.8273.2 timing requirements.
In the following, we first give an overview of cuPHY library software stack. cuPHY library consists of L1 controller components running on the CPU and PHY layer functions running on the GPU. After providing the overview, we will go into details of each component and explain how L1 controller components interact with each other and L2. Finally, we will go over the PHY layer signal processing functions, which are accelerated as CUDA kernel implementations.
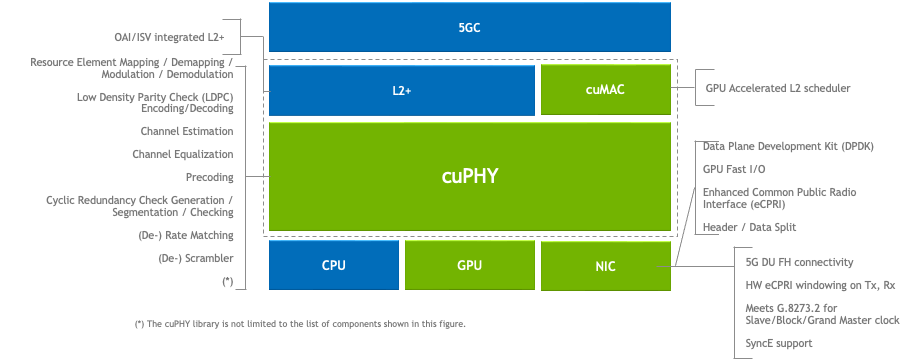
Aerial CUDA-Accelerated Software Stack within 5G gNB DU#