Comm Channel Programming Guide
NVIDIA DOCA Comm Channel Programming Guide
This guide provides instructions on how to use the DOCA Comm Channel API.
The DOCA Comm Channel provides a secure, network-independent communication channel between the host and the DPU.
The communication channel allows the host to control services on the DPU or to activate certain offloads.
The DOCA Comm Channel is reliable, message-based, and supports connecting multiple clients to a single service. The API allows communication between a client using any PF/VF/SF on the host to a service on the DPU.
The CC service can only run on the DPU while the client can only run on a host connected to the DPU.
Refer to NVIDIA DOCA Release Notes for the supported versions of firmware, OS, and MLNX_OFED.
3.1. Objects
3.1.1. struct doca_comm_channel_ep_t
Represents a Comm Channel endpoint either on the client or service side. The endpoint is needed for every other Comm Channel API function.
struct doca_comm_channel_ep_t;
3.1.2. struct doca_comm_channel_addr_t
Also referred to as peer_address, represents a connection and can be used to identify the source of a received message. It. It is required to send a message using doca_comm_channel_ep_sendto().
3.2. Querying Device Capabilities
Querying the device capabilities allows users to know the derived Comm Channel limitation (see section Limitations for more information) and to set the properties of an endpoint accordingly.
The capabilities under this section, apart from maximal service name length, may vary between different devices. To select the device you wish to establish a connection upon, you may query each of the devices for its capabilities.
3.2.1. doca_comm_channel_get_max_service_name_len()
As each connection requires a name, users must know the maximal length of the name and may use this function to query it. This length includes the null-terminating character, and any name longer than this length is not accepted when trying to establish a connection with Comm Channel.
doca_error_t doca_comm_channel_get_max_service_name_len(uint32_t *max_service_name_len);
-
max_service_name_len [out] - Pointer to a parameter that holds the max service name length on success.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.2.2. doca_comm_channel_get_max_message_size()
Each connection has an upper limit for messages size. This function returns the maximal value that can be set for this property, for a given device. This limitation is important when trying to set the max message size for an endpoint with doca_comm_channel_ep_set_max_msg_size().
doca_error_t doca_comm_channel_get_max_message_size(struct doca_devinfo *devinfo, uint32_t *max_message_size);
-
devinfo [in] - Pointer to a doca_devinfo which should be queried for this capability.
-
max_message_size [out] - Pointer to a parameter that on success holds the maximal value that can be set for max message size when communicating on the provided devinfo.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.2.3. doca_comm_channel_get_max_send_queue_size()
Returns the maximum send queue size that can be set for a given device. This value describes the maximum possible amount of outgoing in-flight messages for a connection. This limitation is important when trying to set the max message size for an endpoint with doca_comm_channel_ep_set_send_queue_size().
doca_error_t doca_comm_channel_get_max_send_queue_size(struct doca_devinfo *devinfo, uint32_t *max_send_queue_size);
-
devinfo [in] - Pointer to a doca_devinfo which should be queried for this capability.
-
max_message_size [out] - Pointer to a parameter that on success holds the maximal value that can be set for max message size when communicating on the provided devinfo.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.2.4. doca_comm_channel_get_max_recv_queue_size()
Returns the maximum receive queue size that can be set for a given device. This value describes the maximum possible amount of incoming in-flight messages for a connection. This limitation is important when trying to set the max message size for an endpoint with doca_comm_channel_ep_set_send_queue_size().
doca_error_t doca_comm_channel_get_max_recv_queue_size(struct doca_devinfo *devinfo, uint32_t *max_recv_queue_size);
-
devinfo [in] - Pointer to a doca_devinfo which should be queried for this capability.
-
max_message_size [out] - Pointer to a parameter that on success holds the maximal value that can be set for max message size when communicating on the provided devinfo.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.2.5. doca_comm_channel_get_service_max_num_connections()
Returns the maximum amount of connections a service on the DPU can maintain for a given device. If the maximum amount returned is zero, the number of connections is unlimited.
doca_error_t doca_comm_channel_get_service_max_num_connections(struct doca_devinfo *devinfo, uint32_t *max_num_connections);
-
devinfo [in] - Pointer to a doca_devinfo which should be queried for this capability.
-
max_num_connections [out] - Pointer to a parameter that on success holds the maximal value that can be set for max message size when communicating on the provided devinfo.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.3. Creating and Configuring Endpoint
3.3.1. doca_comm_channel_ep_create()
This function is used to create and initialize the endpoint used for all Comm Channel functions.
doca_error_t doca_comm_channel_ep_create(struct doca_comm_channel_ep_t **ep);
-
ep [out] -
Pointer to the created endpoint object.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.3.2. doca_comm_channel_ep_set_*() and doca_comm_channel_ep_get_*()
Use doca_comm_channel_ep_set_*() functions to set the properties of the endpoint and corresponding doca_comm_channel_ep_get_*() functions to retrieve the current properties of the endpoint.
3.3.2.1. Mandatory Properties
To use the endpoint, the following properties must be set before calling doca_comm_channel_ep_listen() and doca_comm_channel_ep_connect().
3.3.2.1.1. doca_comm_channel_ep_set_device()
This function sets the local device through which the communication should be established.
doca_error_t doca_comm_channel_ep_set_device(struct doca_comm_channel_ep_t *local_ep, struct doca_dev *device);
-
local_ep [in] - Pointer to the endpoint for which the property should be set.
-
device [in] - The doca_dev object which should be used for communication.
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.3.2.1.2. doca_comm_channel_ep_set_device_rep()
This function sets the device representor through which the communication should be established on the service side.
doca_error_t doca_comm_channel_ep_set_device_rep(struct doca_comm_channel_ep_t *local_ep, struct doca_dev_rep *device_rep);
-
local_ep [in] - Pointer to the endpoint for which the property should be set.
-
device_rep [in] - The doca_dev_rep object which should be used for communication
- Returns
- doca_error_t value. DOCA_SUCCESS if successful, or an error value upon failure. Possible error values are documented in the header file.
3.3.2.2. Optional Properties
The following properties have a default value and may be set as long as the EP is not yet active.
3.3.2.2.1. doca_comm_channel_ep_set_max_msg_size()
This function sets an upper limit to the size of the messages the application wishes to handle in this EP while communicating with a given endpoint. The actual max_msg_size may be increased by this function. If this property was not set by the user, a default value is used and may be queried using doca_comm_channel_ep_get_max_msg_size() function.
doca_error_t doca_comm_channel_ep_set_max_msg_size(struct doca_comm_channel_ep_t *local_ep, uint16_t max_msg_size);
-
local_ep [in] - Pointer to a parameter that holds the max service name length on success.
-
max_msg_size [in] - The preferred maximal message size.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful
- DOCA_ERROR_INVALID_VALUE if a null pointer to the endpoint is given or if max_msg_size is equal to 0 or above the maximal value possible for this property
3.3.2.2.2. doca_comm_channel_ep_set_send_queue_size()
This function sets the send queue size used when communicating with a given endpoint. The actual send_queue_size may be increased by this function. If this property has not been set by the user, a default value is used and may be queried using the doca_comm_channel_ep_get_send_queue_size() function.
doca_error_t doca_comm_channel_ep_set_send_queue_size(struct doca_comm_channel_ep_t *local_ep, uint16_t send_queue_size);
-
local_ep [in] - Pointer to a parameter that holds the max service name length on success.
-
max_msg_size [in] - The preferred maximal message size.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful
- DOCA_ERROR_INVALID_VALUE if a null pointer to the endpoint is given or if max_msg_size is equal to 0 or above the maximal value possible for this property
- The rest of the error values that may be returned are documented in the header file
3.3.2.2.3. doca_comm_channel_ep_set_recv_queue_size()
This function sets the receive queue size used when communicating with a given endpoint. The actual recv_queue_size may be increased by this function. If this property has not been set by the user, a default value is used which may be queried using doca_comm_channel_ep_get_recv_queue_size() function.
doca_error_t doca_comm_channel_ep_set_recv_queue_size(struct doca_comm_channel_ep_t *local_ep, uint16_t rcv_queue_size);
-
local_ep [in] - Pointer to a parameter that holds the max service name length on success.
-
max_msg_size [in] - The preferred maximal message size.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful
- DOCA_ERROR_INVALID_VALUE if a null pointer to the endpoint is given or if rcv_queue_size is equal to 0 or above the maximal value possible for this property
- The rest of the error values that may be returned are documented in the header file
3.4. Establishing Connection over Endpoint
The Comm Channel connection is established between endpoints, one on the host and the other on the DPU.
For a client, each connection requires its own EP. On the DPU side, all of the clients with the same service name on a specific representor are connected to a single EP, through which the connections are managed.
The following functions are relevant for the endpoint.
3.4.1. doca_comm_channel_ep_listen()
Used to listen on service endpoint, this function can only be called on the DPU. The service listens on the DOCA device representor provided using doca_comm_channel_ep_set_device_rep().
Calling listen allows clients to connect to the service.
doca_error_t doca_comm_channel_ep_listen(struct doca_comm_channel_ep_t *local_ep, const char *name);
-
local_ep - Pointer to an endpoint to listen on.
-
name [in] - The name for the service to listen on. Clients must provide the same name to connect to the service.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_BAD_STATE if mandatory properties (doca_dev and doca_dev_rep) were not set.
- DOCA_ERROR_NOT_PERMITTED if called on the host and not on the DPU.
- The rest of the error values that may be returned are documented in the header file.
3.4.2. doca_comm_channel_ep_connect()
Used to create a connection between a client and a service. This function can only be called on the host.
doca_error_t doca_comm_channel_ep_connect(struct doca_comm_channel_ep_t *local_ep,
const char *name, struct doca_comm_channel_addr_t **peer_addr);
-
local_ep [in] - A pointer to an endpoint to connect from.
-
name [in] - The name of the service that the client connects to. Must be the same name the service listens on.
-
peer_addr [out] - Contains the pointer to the new connection.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_BAD_STATE if mandatory property (doca_dev) was not set.
- DOCA_ERROR_NOT_PERMITTED if called on the host and not on the DPU.
- The rest of the error values that may be returned are documented in the header file.
3.5. Event Channel
Getting notifications for messages sent and received through an EP is managed by the event channel, using the functions listed here.
3.5.1. doca_comm_channel_ep_get_event_channel()
After a connection is established through the EP, this function extracts send/receive handles which can be used to get an interrupt when a new event happens using epoll() or a similar function.
- A send event happens when at least one in-flight message processing ends
- A receive event happens when a new incoming message is received
Users may decide to extract only one of the handles and send a NULL parameter for the other.
The event channels are owned by the endpoint and they are released when doca_comm_channel_ep_destroy() is called.
doca_error_t doca_comm_channel_ep_get_event_channel(struct doca_comm_channel_ep_t *local_ep,
doca_event_channel_t *send_event_channel, doca_event_channel_t *recv_event_channel);
-
local_ep [in] - Pointer to the endpoint for which a handle should be returned.
-
send_event_channel [out] - Pointer that holds a handle for sent messages if successful.
-
recv_event_channel [out] -
Pointer that holds a handle for received messages if successful.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_BAD_STATE if no connection has been established (i.e., doca_comm_channel_ep_listen() or doca_comm_channel_ep_connect() has not been called beforehand).
- The rest of the error values that may be returned are documented in the header file.
3.5.2. doca_comm_channel_ep_event_handle_arm_send()
After an interrupt caused by an event on the handle for sent messages, the handle should be re-armed to enable interrupts on it:
doca_error_t doca_comm_channel_ep_event_handle_arm_send(struct doca_comm_channel_ep_t *local_ep);
-
local_ep [in] - Pointer to the endpoint from which the handle has been extracted.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file.
3.5.3. doca_comm_channel_ep_event_handle_arm_recv()
After an interrupt caused by an event on the handle for received messages, the handle should be re-armed to enable interrupts on it:
doca_error_t doca_comm_channel_ep_event_handle_arm_recv(struct doca_comm_channel_ep_t *local_ep);
-
local_ep [in] - Pointer to the endpoint from which the handle has been extracted.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file.
3.6. doca_comm_channel_ep_sendto()
Used to send a message from one side to the other. This function runs in non-blocking mode. Refer to chapter Usage for more details.
doca_error_t doca_comm_channel_ep_sendto(struct doca_comm_channel_ep_t *local_ep, const void *msg
size_t len, int flags, struct doca_comm_channel_addr_t *peer_addr);
-
local_ep [in] - Pointer to an endpoint to send the message from.
-
msg [in] - Pointer to the buffer that contains the data to be sent.
-
len [in] - Length of data to be sent.
-
flags [in] - Currently, only DOCA_CC_MSG_FLAG_NONE is valid.
-
peer_addr [in] - Peer address to send the message to (see also struct doca_comm_channel_addr_t) that has been returned by doca_comm_channel_ep_connect() or doca_comm_channel_rp_recvfrom().
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_AGAIN if the send queue is full and this function should be called again.
- DOCA_ERROR_CONNECTION_RESET if the provided peer_addr experienced an error and must be disconnected.
- The rest of the error values that may be returned are documented in the header file.
3.7. doca_comm_channel_ep_recvfrom
Used to receive a packet of data on either the service or the host. This function runs in non-blocking mode. Refer to chapter Usage for more details.
doca_error_t doca_comm_channel_ep_recvfrom(struct doca_comm_channel_ep_t *local_ep, void *msg,
size_t *len, int flags, struct doca_comm_channel_addr_t **peer_addr);
-
local_ep [in] -
Pointer to an endpoint to receive the message on.
-
msg [out] - Pointer to a buffer that message should be written to.
-
len [in/out] - The input is the length of the given message buffer (msg). The output is the actual length of the received message.
-
flags [in] - DOCA_CC_MSG_FLAG_DONTWAIT
-
peer_addr [out] - Handle to peer_addr that represents the connection the message arrived from.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_AGAIN if no message is received.
- DOCA_ERROR_CONNECTION_RESET if the message received is from a peer_addr that has an error.
- The rest of the error values that may be returned are documented in the header file.
3.8. Information Regarding Each Connection
Each connection established over the EP is represented by a doca_comm_channel_addr_t structure, which can also be referred to as a peer_addr. This structure is returned by either doca_comm_channel_ep_connect() when a connection is established or by doca_comm_channel_ep_recvfrom() to identify the connection from which the message has been received.
3.8.1. doca_comm_channel_peer_addr_set_user_data() and doca_comm_channel_peer_addr_get_user_data()
Using doca_comm_channel_peer_addr_set_user_data(), users may give each connection a context, similar to an ID, to identify it later, using doca_comm_channel_peer_addr_get_user_data(). If a context is not set for a peer_addr, it is given the default value "0".
doca_error_t doca_comm_channel_ep_recvfrom(struct doca_comm_channel_ep_t *local_ep, void *msg,
size_t *len, int flags, struct doca_comm_channel_addr_t **peer_addr);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
-
user_context [in] - Context that should be set for the connection.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_INVALID_VALUE if peer_address is NULL.
doca_error_t doca_comm_channel_peer_addr_get_user_data(struct doca_comm_channel_addr_t *peer_addr, uint64_t *user_context);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
-
user_context [out] - Pointer to a parameter that holds the context if successful.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_INVALID_VALUE if the parameters is NULL.
3.8.2. Querying Statistics for Connection
Using the peer_addr, users may gather and query the following statistics:
- The number of messages sent
- The number of bytes sent
- The number of messages received
- The number of bytes received
- The number of outgoing messages yet to be sent
3.8.2.1. doca_comm_channel_peer_addr_update_info()
Takes a snapshot with the current statistics of the connection. This function should be called prior to any statistics querying function. It is also used to check the connection status. See Connection Flow for more.
doca_error_t doca_comm_channel_peer_addr_update_info(struct doca_comm_channel_addr_t *peer_addr);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_CONNECTION_INPROGRESS if the connection has yet to be established
- DOCA_ERROR_CONNECTION_ABORTED if the connection is in an error state
- The rest of the error values that may be returned are documented in the header file
3.8.2.4. doca_comm_channel_peer_addr_get_recv_messages()
This function return the total number of messages received from a given peer_addr as measured when doca_comm_channel_peer_addr_update_info() has been last called.
doca_error_t doca_comm_channel_peer_addr_get_recv_messages(const struct doca_comm_channel_addr_t *peer_addr, uint64_t *recv_messages);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
-
recv_messages [out] - pointer to a parameter that holds the number of messages received from the peer_addr on success.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file
3.8.2.5. doca_comm_channel_peer_addr_get_recv_bytes()
This function will return the total number of bytes received from a given peer_addr as measured when doca_comm_channel_peer_addr_update_info() has been last called.
doca_error_t doca_comm_channel_peer_addr_get_recv_bytes(const struct doca_comm_channel_addr_t *peer_addr, uint64_t *recv_bytes);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
-
recv_messages [out] - Pointer to a parameter that holds the number of bytes sent through the peer_addr on success.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file
3.8.2.6. doca_comm_channel_peer_addr_get_send_in_flight_messages()
This function will return the total number of bytes received from a given peer_addr as measured when doca_comm_channel_peer_addr_update_info() has been last called.
doca_error_t doca_comm_channel_peer_addr_get_send_in_flight_messages(const struct doca_comm_channel_addr_t *peer_addr,
uint64_t *send_in_flight_messages);
-
peer_addr [in] - Pointer to doca_comm_channel_addr_t structure representing the connection.
-
send_in_flight_messages [out] - Pointer to a parameter that holds the number of in-flight messages to the peer_addr on success.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file
3.9. doca_comm_channel_ep_disconnect()
Disconnects an endpoint from a specific peer_address. The disconnection is one-sided and the other side is unaware of it. New connections can be created afterwards. Refer to Usage for more details.
doca_error_t doca_comm_channel_ep_disconnect(struct doca_comm_channel_ep_t *local_ep, struct doca_comm_channel_addr_t *peer_addr);
-
local_ep [in] - Pointer to the endpoint that should be disconnected.
-
peer_addr [in] - The connection from which the endpoint should be disconnected.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- DOCA_ERROR_NOT_CONNECTED if there is no connection between the endpoint and the peer address
3.10. doca_comm_channel_ep_destroy
Disconnects all connections of the endpoint, destroys the endpoint object, and frees all related resources.
doca_error_t doca_comm_channel_ep_destroy(struct doca_comm_channel_ep_t *ep);
-
local_ep [in] - Endpoint to destroy.
- Returns
-
doca_error_t value:
- DOCA_SUCCESS if successful.
- The rest of the error values that may be returned are documented in the header file
4.1. Endpoint Properties
The maximal values of all endpoint properties can be queried using the proper get functions (see Querying Device Capabilities). The max_message_size, send_queue_size, and recv_queue_size attributes may be increased internally. The updated property value can be queried with the proper get functions.
See the following table and doca_comm_channel_ep_set_*() and doca_comm_channel_ep_get_*() for more details.
| Property | Get Function |
|---|---|
| Message size | doca_comm_channel_get_max_message_size() |
| Send queue size | doca_comm_channel_get_max_send_queue_size() |
| Receive queue size | doca_comm_channel_get_max_recv_queue_size() |
| Service name length | doca_comm_channel_get_max_service_name_len() |
4.2. Multi-client
A single service on the DPU can serve multiple clients but a client can only connect to a single service.
The maximal number of clients connected to a single service can be queried using doca_comm_channel_get_service_max_num_connections().
4.3. Multiple Services
Multiple endpoints can be created on the same DPU but different services listening on the same representor must have different names. Services listening on different representors can have the same name.
4.4. Threads
The DOCA Comm Channel is not thread-safe. Using a single endpoint over multiple threads is possible only with the use of locks to prevent parallel usage of the same resources. Different endpoints can be used over different threads with no restriction as each endpoint has its own resources.
5.1. Objects
While working with DOCA Comm Channel, one must maintain two objects:
struct doca_comm_channel_ep_t, referred to as "endpoint"struct doca_comm_channel_addr_t, referred to as "peer_address"
5.1.2. Peer_address
The peer_address structure represents a connection. It is created when a new connection is made (i.e., client calls doca_comm_channel_ep_connect() or a service receives a connection through doca_comm_channel_ep_recvfrom()). Refer to section Connection Flow for more details on connections.
The peer_address structure can be used to identify the source of a received message and is necessary to send a message using doca_comm_channel_ep_sendto(). peer_address has an identifier, user_data, which can be set by the user using doca_comm_channel_peer_addr_user_data_set() and retrieved using doca_comm_channel_peer_addr_user_data_get(). The default value for user_data is 0. The user_data field can be used to identify the peer_address object.
5.2. Endpoint Initialization
To start using the DOCA Comm Channel, the user must create an endpoint object using the doca_comm_channel_ep_create() function. After creating the endpoint object, the user must set the mandatory endpoint properties: doca_dev for client and service, doca_dev_rep for service only. The user may also set the optional endpoint properties.
For further information about endpoint initialization, refer to Establishing Connection over Endpoint.
5.3. Connection Flow
The following diagram illustrates the process of establishing a connection between the host and a service.
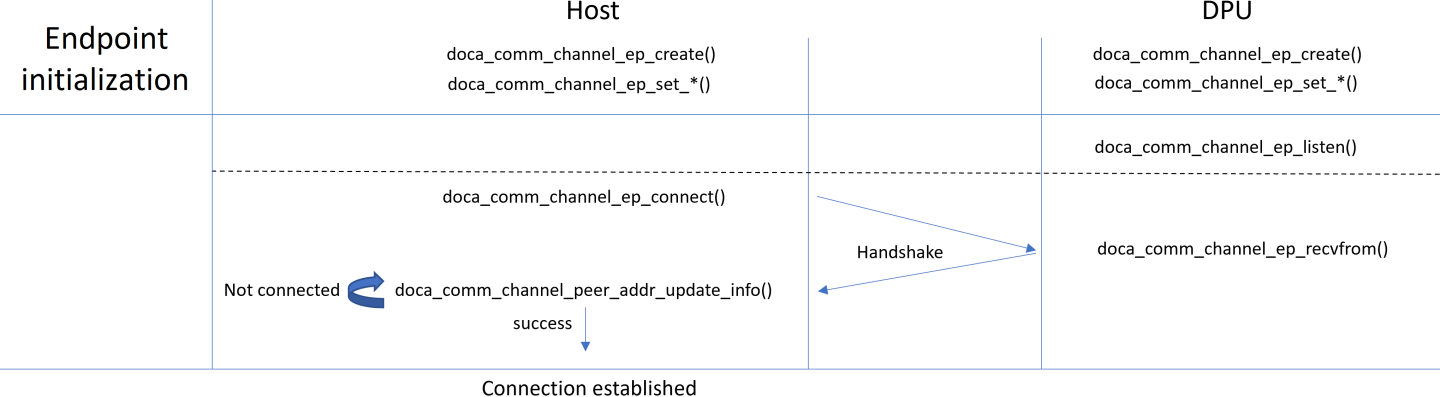
- After initializing the endpoint on the service side, one should call
doca_comm_channel_ep_listen()with a legal service name (see Limitations) to start listening. - After the service starts listening and the client endpoint is created, the client calls
doca_comm_channel_ep_connect()with the same service name used for listening.
As part of the connect function, the client starts a handshake protocol with the server. If connect is called before the service is listening or the handshake process fails, then the connect function fails.
From the connect function, the client receives a peer_addr object representing the new connection to the service:
- To check whether the connection is complete or not, the client must call
doca_comm_channel_peer_addr_info_get()with the newpeer_addr. Depending on the function return code, the client would know whether the connection is complete (DOCA_SUCCESS), rejected (DOCA_ERROR_CONNECTION_ABORTED) or still in progress (DOCA_ERROR_CONNECTION_INPROGRESS). - The service receiving new connections is done using
doca_comm_channel_ep_recvfrom(). No indication is given that a new connection is made. The server keeps waiting to receive packets. If the handshake fails or is done for an existing client, then the receive function fails.
For more information, see section doca_comm_channel_ep_listen().
5.5. Event Channel and Event Handling
When trying to send or receive messages, the application may face a situation where the resources are not ready—send queue full or no new messages received. In this case, the Comm Channel returns DOCA_ERROR_AGAIN for the call. This return value indicates that the function must be called again later in order to complete. To know when to call the send/receive function again, the application can use two approaches:
- Active polling – that is, to use a loop to call the send/receive functions immediately or after a certain time until the
DOCA_SUCCESSreturn code is received -
Using CC event channel to know when to call the send/receive function again
The CC event channel is a mechanism that enables getting an event when a new CC event happens. It is divided to send and receive event channels which can be retrieved using
doca_comm_channel_ep_get_event_channel(). After retrieving the event channels, the application can usepollin Linux orGetQueuedCompletionStatusin Windows to sleep and wait for events.When first using the event channels and after each event is received using the event channel, it must be armed using
doca_comm_channel_ep_event_handle_arm_send()ordoca_comm_channel_ep_event_handle_arm_recv()to receive more events.For more information, see Event Channel.
5.6. Connection Errors
In certain cases, for example if a remote peer disconnects and the local endpoint tries sending a message, a peer_addr can move to error state. In such cases, no new messages can be sent to or received from the certain peer_addr.
The Comm Channel indicates a peer_addr is in an error state by returning DOCA_ERROR_CONNECTION_RESET on doca_comm_channel_ep_sendto() if trying to send a message to an errored peer_addr or on doca_comm_channel_ep_recvfrom() when receiving a message from a peer_addr marked as errored, or when calling doca_comm_channel_peer_addr_update_info().
When a peer_addr is in an error state, it is the application's responsibility to disconnect the said peer_addr using doca_comm_channel_ep_disconnect().
5.7. Connection Statistics
The peer_addr object provides a statistics mechanism. To get the updated statistics, the application should call doca_comm_channel_peer_addr_update_info() which saves a snapshot of the current statistics.
After calling the update function, the application can query the following statistics which return the data from that snapshot:
| Statistic Function | Returns |
|---|---|
| doca_comm_channel_peer_addr_get_send_messages() | Number of messages sent to the specific peer_addr |
| doca_comm_channel_peer_addr_get_send_bytes() | Number of bytes sent to the specific peer_addr |
| doca_comm_channel_peer_addr_get_recv_messages() | Number of messages received from the specific peer_addr |
| doca_comm_channel_peer_addr_get_recv_bytes() | Number of bytes received from the specific peer_addr |
| doca_comm_channel_peer_addr_get_send_in_flight_messages() | Number of messages sent to the specific peer_addr and without returning a confirmation yet |
The in-flight messages can be used to make sure all messages have been successfully sent before disconnecting or destroying the endpoint.
For more information, see Querying Statistics for Connection.
5.8. Disconnection Flow
Disconnection can occur specifically by using doca_comm_channel_ep_disconnect() or when destroying the whole endpoint.
Disconnection is one-sided, which means that the other side is unaware of the channel being closed and experiences errors when sending data. It is up to the application to synchronize the connection teardown.
Disconnection of a peer_addr destroys all of the resources related to it.
It is possible to perform another handshake and establish a new channel connection after disconnection.
For more information, see doca_comm_channel_ep_disconnect().
Refer to NVIDIA DOCA Comm Channel Sample Guide for more information about the API of this DOCA library.
Notice
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation nor any of its direct or indirect subsidiaries and affiliates (collectively: “NVIDIA”) make no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assume no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.
Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.
THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.
Trademarks
NVIDIA, the NVIDIA logo, and Mellanox are trademarks and/or registered trademarks of Mellanox Technologies Ltd. and/or NVIDIA Corporation in the U.S. and in other countries. The registered trademark Linux® is used pursuant to a sublicense from the Linux Foundation, the exclusive licensee of Linus Torvalds, owner of the mark on a world¬wide basis. Other company and product names may be trademarks of the respective companies with which they are associated.
Copyright
© 2022 NVIDIA Corporation & affiliates. All rights reserved.