RDMA Programming Guide
NVIDIA DOCA RDMA Programming Guide
This guide provides an overview and configuration instructions for the DOCA RDMA API.
This library is currently supported at beta level only.
DOCA RDMA enables direct access to the memory of remote machines, without interrupting the processing of their CPUs or operating systems. Avoiding CPU interruptions reduces context switching for I/O operations, leading to lower latency and higher bandwidth compared to traditional network communication methods.
DOCA RDMA library provides an API to execute the various RDMA operations.
This document is intended for software developers wishing to improve their applications by utilizing RDMA operations.
DOCA RDMA consists of two connected sides, passing data between one another. This includes the option for one side to access the remote side's memory if the granted permissions allow it.
The connection between the two sides can either be based on InfiniBand (IB) or based on Ethernet using RoCE. Currently, only reliable connection (RC) transport type is supported. The different operations that may be executed between the two sides, using DOCA RDMA, are:
- Receive
- Send
- Send with Immediate
- Write
- Write with Immediate
- Read
- Atomic Compare & Swap
- Atomic Fetch & Add
DOCA RDMA relies heavily on the underlying DOCA core architecture for its operation, including the memory map, buffer objects, context and workq. RDMA operations are requested by submitting an RDMA job on the relevant workq. The DOCA RDMA library then executes that operation asynchronously before posting a completion event on the work queue.
The DOCA RDMA library supports scatter-gather (SG) DOCA buffers in some jobs utilizing the linked list option. For job-specific information, refer to DOCA RDMA Job Structures.
This chapter details of the specific structures and enums related to the DOCA RDMA library.
Refer to Usage to learn how to use DOCA RDMA API (including all RDMA functions) to run a program from start to finish.
4.1. DOCA RDMA Job Structures
The API for DOCA RDMA consists of 4 unique DOCA RDMA unique job structures that can be used the execute a total of 7 different DOCA RDMA jobs. This section overviews the different job structures, their expected inputs, and results.
Each DOCA RDMA job structure includes a doca_job structure as its base:
struct doca_job {
int type; /**< Defines the type of the job. */
int flags; /**< Job submission flags (see `enum doca_job_flags`). */
struct doca_ctx *ctx; /**< Doca CTX targeted by the job. */
union doca_data user_data; /**< Job identifier provided by user. Will be returned back on completion. */
};
For each job submitted using DOCA RDMA, the following applies:
- It is expected that the
flagsfield value isDOCA_JOB_FLAGS_NONE(part ofenum doca_job_flags), since there are currently no jobs that use flags in DOCA RDMA. - The
ctxfield should point to a valid DOCA RDMA context. The context can be retrieved once the RDMA instance is created usingdoca_rdma_as_ctx(). - The
user_datafield can hold whatever value the user desires and is returned untouched to the user on completion of the given job.
4.1.1. DOCA RDMA Receive
This job should be submitted prior to an expected submission of a send/send with immediate/write with immediate job on the remote side.
struct doca_rdma_job_recv {
struct doca_job base; /**< Common job data */
struct doca_buf *dst_buff; /**< Destination data buffer,
* chain len must not exceed recv_buf_chain_len property
*/
};
To execute an DOCA RDMA receive job, the value of base.type field should be set to DOCA_RDMA_JOB_RECV (part of the enum doca_rdma_job_types).
The destination buffer (dst_buff) should point to a local memory address to which the received message is written on success.
The given destination buffer/chain of buffers (given in dst_buff) must have a total length sufficient for the expected message size or the job will fail.
The destination buffer is not mandatory and may be NULL when the requested DOCA RDMA job on the remote side is "write with immediate" or when the remote side is sending an empty message, with or without immediate (may be relevant when wanting to keep a connection alive).
For the purpose of the DOCA RDMA receive job, the length of each buffer is considered as the length from the beginning of the data section until the end of the buffer. The data length is updated if data is written to the buffer once the job is successfully completed, according to the received data length. For more information, refer to the NVIDIA DOCA Core Programming Guide.
The total length of the message must not exceed the max_message_size device capability or 2GB (whichever is lower). Also note that the number of chained buffers shall not exceed the recv_buf_chain_len property of the RDMA instance. Refer to Usage to understand how to retrieve max_message_size and recv_buf_chain_len.
4.1.2. DOCA RDMA Send
This job should be submitted to transfer a message to the remote side, with or without immediate data, and while the remote side is expecting a message and had submitted a receive job beforehand.
struct doca_rdma_job_send {
struct doca_job base; /**< Common job data */
struct doca_buf const *src_buff; /**< Source data buffer */
doca_be32_t immediate_data; /**< Immediate data */
struct doca_rdma_addr const *rdma_peer_addr; /**< Optional: For RDMA context of type UD or DC */
};
To execute a DOCA RDMA send or send with immediate job, the value of the base.type field should be set to DOCA_RDMA_JOB_SEND/DOCA_RDMA_JOB_SEND_IMM respectively (part of enum doca_rdma_job_types).
The total length of the given source buffer/chain of buffers (in src_buff) may not exceed the expected message size on the remote side or the job will fail.
The source buffer is not mandatory and may be NULL when wishing to send an empty message, with or without immediate (may be relevant when wishing to keep a connection alive).
The total length of the message must not exceed the max_message_size device capability or 2GB (whichever is lower). Refer to Usage to understand how to retrieve max_message_size.
The immediate_data field is a 32-bit value sent to the remote side, out-of-band, and should be in Big-Endian format. This value is transferred only when the job type is DOCA_RDMA_JOB_SEND_IMM, and is received by the remote side only once a receive job is completed successfully.
Currently, the rdma_peer_addr field is not in use as DC and UD transport types are not yet supported.
4.1.3. DOCA RDMA Read/Write
These jobs should be submitted when wishing to access (read or write) data from remote memory (i.e., the memory on the remote side of the connection).
struct doca_rdma_job_read_write {
struct doca_job base; /**< Common job data */
struct doca_buf *dst_buff; /**< Destination data buffer */
struct doca_buf const *src_buff; /**< Source data buffer */
doca_be32_t immediate_data; /**< Immediate data for write with imm */
struct doca_rdma_addr const *rdma_peer_addr; /**< Optional: For RDMA context of type DC */
};
Note that for each read or write job submitted using DOCA RDMA, the following applies:
- The source buffer (
src_buff) is not mandatory and may be NULL when wishing to read or write zero bytes (might be relevant when wishing to keep a connection alive). In such a case, the destination buffer may be NULL as well. - Currently, the
rdma_peer_addrfield is not in use as DC transport type is not yet supported.
4.1.3.1. DOCA RDMA Read
To execute a DOCA RDMA read job, the value of base.type field should be set to DOCA_RDMA_JOB_READ (part of the enum doca_rdma_job_types).
The destination buffer (dst_buff) should point to a local memory address to which the read data is written on success and the source buffer should point to a remote memory address from which the data should be read.
The given source buffer length must not exceed the max_message_size device capability or 2GB (whichever is lower). Refer to Usage to understand how to retrieve max_message_size.
The immediate_data field is ignored.
4.1.3.2. DOCA RDMA Write
To execute a DOCA RDMA write or write with immediate job, the value of base.type field should be set to DOCA_RDMA_JOB_WRITE/DOCA_RDMA_JOB_WRITE_IMM respectively (part of the enum doca_rdma_job_types).
The destination buffer (dst_buff) should point to a remote memory address to which the data is written on success and the source buffer should point to a local memory address from which the data should be read.
The total length of the given source buffer/chain of buffers must be not exceed the max_message_size device capability or 2GB (whichever is lower). Refer to Usage to understand how to retrieve max_message_size.
The immediate_data field is a 32-bit value sent to the remote side, out-of-band, and should be in a Big-Endian format. This value is transferred only when the job type is DOCA_RDMA_JOB_WRITE_IMM and is received by the remote side only once a receive job is completed successfully.
4.1.4. DOCA RDMA Atomic
These jobs should be submitted when wishing to execute an 8-byte atomic operation on the remote memory, the memory on the remote side.
struct doca_rdma_job_atomic {
struct doca_job base; /**< Common job data */
struct doca_buf *cmp_or_add_dest_buff; /**< Destination data buffer */
struct doca_buf *result_buff; /**< Result of the atomic operation:
* remote original data before add, or remote original data
* before compare
*/
uint64_t swap_or_add_data; /**< For add, the increment value
* for cmp, the new value to swap
*/
uint64_t cmp_data; /**< Value to compare for compare and swap */
struct doca_rdma_addr const *rdma_peer_addr; /**< Optional: For RDMA context of type DC */
};
For each atomic job submitted using DOCA RDMA, the following applies:
- The destination buffer (
cmp_or_add_dest_buff) should point to a remote memory address and its data section must begin in a memory address aligned to 8 bytes. - The result buffer (
result_buff) should point to a local memory address and the original value of the destination buffer (before executing the atomic operation) will be written to it on success. The data length of this buffer must be exactly 8 bytes long. - Currently, the
rdma_peer_addrfield is not in use as DC transport type is not yet supported.
4.1.4.1. DOCA RDMA Atomic Compare and Swap
To execute a DOCA RDMA atomic compare and swap job, the value of base.type field should be set to DOCA_RDMA_JOB_ATOMIC_CMP_SWP (part of the enum doca_rdma_job_types).
The compare data field (cmp_data) is a 64-bit value that is compared to the value in the destination buffer (the first 64-bit following the beginning of the data section of the buffer).
- If the compared values are equal, the value in the destination is swapped with the 64-bit value in the jobs swap data field (
swap_or_add_data) - If the compared values are not equal, the value in the destination value remains unchanged
4.1.4.2. DOCA RDMA Atomic Fetch and Add
When wishing to execute a DOCA RDMA atomic fetch and add job, the value of base.type field should be set to DOCA_RDMA_JOB_ATOMIC_FETCH_ADD (part of the enum doca_rdma_job_types).
The value in the destination is increased by the 64-bit value in the job's add data field (swap_or_add_data).
The compare data field (cmp_data) is ignored.
4.2. DOCA RDMA Job Result Structure
Once a job is submitted and its progress is successfully retrieved, the doca_rdma_result struct is updated as part of the doca_event returned (see Waiting for Job Completion for more information).
struct doca_rdma_result {
doca_error_t result; /**< Operation result */
enum doca_rdma_opcode_t opcode; /**< Opcode in case of doca_rdma_job_recv completion */
struct doca_rdma_addr *rdma_peer_addr; /**< Peer Address for UD and DC */
doca_be32_t immediate_data; /**< Immediate data, valid only if opcode indicates */
/** 'dst_buff' data positioning will get updated on RECV and READ ops */
};
The result field holds a doca_error_t representing the result of the job.
The rdma_peer_addr field is currently not in use as DC and UD transport types are not yet supported.
The following fields are valid only when the doca_rdma_result returns a successful completion of a receive job:
- The
opcodefield represents which job has been submitted by the remote side that required there to be a receive job - The
immediate_datafield is valid only when theopcodefield value isDOCA_RDMA_OPCODE_RECV_SEND_WITH_IMMorDOCA_RDMA_OPCODE_RECV_WRITE_WITH_IMM. This holds the 32-bit immediate data sent from the remote side in Big-Endian format.
4.3. DOCA RDMA State Enum
These values describe the state of the RDMA instance at any point:
enum doca_rdma_state {
DOCA_RDMA_STATE_RESET = 0,
DOCA_RDMA_STATE_INIT,
DOCA_RDMA_STATE_CONNECTED,
DOCA_RDMA_STATE_ERROR,
};
-
DOCA_RDMA_STATE_RESET -
The initial state of any RDMA instance. This state can be returned to, at any time, by calling
doca_ctx_stop(). -
DOCA_RDMA_STATE_INIT -
The RDMA instance is initialized (
doca_ctx_start()has been called) and is ready to be connected (i.e.,doca_rdma_export()anddoca_rdma_connect()may be called). -
DOCA_RDMA_STATE_CONNECTED -
The RDMA instance is connected to another RDMA instance (
doca_rdma_connect()has been called) and communication between the peers is possible. -
DOCA_RDMA_STATE_ERROR -
The RDMA instance is in an error state. Trying to communicate between the peers would result in an error. Both sides should be reset (i.e. call
doca_ctx_stop()).
4.4. DOCA RDMA Transport Type Enum
This enum includes the possible transport types in RDMA:
enum doca_rdma_transport_type {
DOCA_RDMA_TRANSPORT_RC, /**< RC transport */
DOCA_RDMA_TRANSPORT_DC, /**< DC transport, currently not supported */
};
The following subsections go through the various stages required to initialize, execute, and clean up RDMA operations.
Note that the DOCA RDMA library relies on the use of doca_ctx and doca_workq to execute RDMA jobs. The following explanations regarding the flow and use of DOCA RDMA, require users to be familiar with these objects (as well as other DOCA Core objects such as doca_dev, doca_mmap, doca_buf_inventory, doca_buf, etc). For more information, see NVIDIA DOCA Core Programming Guide.
5.1. Preparation
The following section describes the necessary steps before executing any RDMA operation.
The order in which the following subsections are presented is non-biding. The user may perform whichever initialization process suits their needs best.
5.1.1. Choosing and Opening a DOCA Device
To execute RDMA operations, a device must be chosen. To choose a device, users may iterate over all DOCA devices (via doca_devinfo_list_create()) and query each for its capabilities relevant to RDMA operations, using doca_rdma_get_*(struct doca_devinfo *, …) functions, and check whether the device is suitable for the RDMA job type that would be performed, using doca_rdma_job_get_supported().
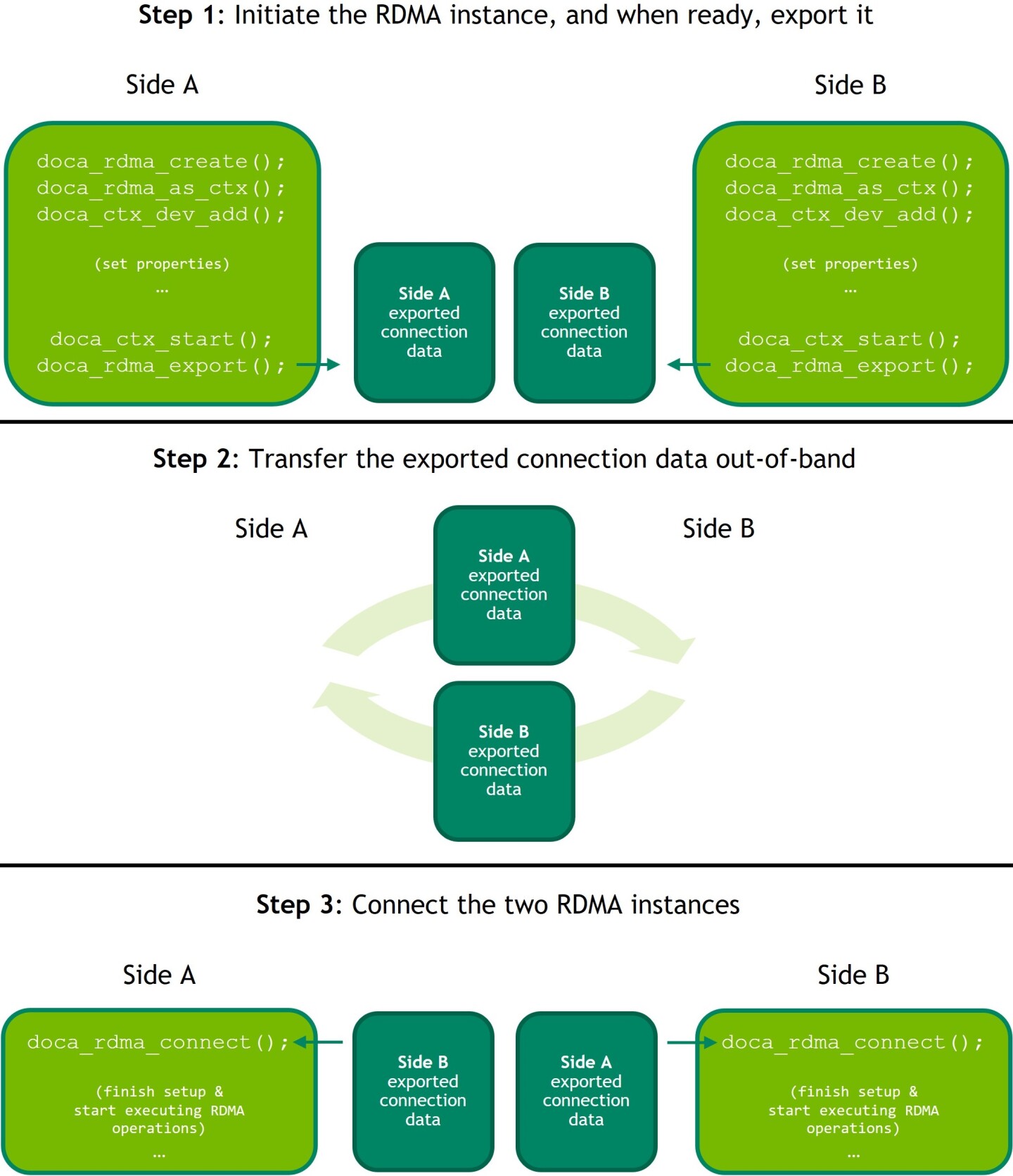
5.1.2. Setting up and Initializing DOCA RDMA Context
- Create an RDMA instance using
doca_rdma_create()and acquire its context usingdoca_rdma_as_ctx(). The state of a newly created RDMA instance isDOCA_RDMA_STATE_RESET. - The chosen device must be added to the RDMA context, using
doca_ctx_dev_add(). - (Optional) Edit the default properties of the RDMA instance and query its properties using the
doca_rdma_set_<property>()anddoca_rdma_get<b>_</b><property>(struct doca_rdma *, …)functions respectively. - Start the RDMA context by using
doca_ctx_start(). Once started, the RDMA instance moves to stateDOCA_RDMA_STATE_INIT. - Export each RDMA instance to the remote side to a blob by using
doca_rdma_export(). - Transfer the blob to the opposite side out-of-band (OOB) and provide it as input to the
doca_rdma_connect()function on that side. Connecting an RDMA instance moves its state toDOCA_RDMA_STATE_CONNECTEDand it is ready to start running jobs.
5.1.3. Creating and Initializing DOCA Core Objects
DOCA RDMA requires several DOCA Core objects to be created, depending on the desired operations (see summary table under DOCA Core Object for RDMA Operations Summary) as specified in the following subsections.
5.1.3.1. WorkQ
Executing any RDMA operation requires creating a work queue using doca_workq_create().
A workq can work in two different modes:
- The default polling mode where the program must check whether a job has finished its execution until receiving confirmation
- The event-driven mode where the program may receive a notification once the job is done
To set the workq to event-driven mode, use doca_workq_set_event_driven_enable(). Then call doca_workq_get_event_handle() to retrieve the workq event handle to be used by epoll (or other Linux wait-for-event interfaces) to wait on events.
Once the RDMA context is started, the workq may be added to it by calling doca_ctx_workq_add().
5.1.3.2. Memory Map
Executing any job in which data is passed between the peers requires creating a memory map (MMAP) on each side using doca_mmap_create().
- Add the chosen device to the memory map using
doca_mmap_dev_add(). - Set the relevant memory map properties. For example, setting the memory range of the MMAP is mandatory and can be done using
doca_mmap_set_memrang(). - Set the MMAP's permissions according to the required RDMA operations using
doca_mmap_set_permissions():- To execute RDMA operations, the MMAP's permissions must include
DOCA_ACCESS_LOCAL_READ_WRITE(fromenum doca_access_flags) - To allow remote access to the memory region of the MMAP, one must set the relevant RDMA permission from the
enum doca_access_flags, according to the required RDMA operations
- To execute RDMA operations, the MMAP's permissions must include
- Start the MMAP so it is ready to use by calling
doca_mmap_start().
To allow remote memory access:
- Export the MMAP using
doca_mmap_export_rdma()and pass it to the remote side (the side requesting the remote RDMA operation). - The remote side must create an MMAP from the exported blob (referred to as remote MMAP from here on) using
doca_mmap_create_from_export().
Both steps may be done later (even after RDMA jobs such as send/receive have executed) but they are necessary for allowing one side (or both) to request remote operations.
5.1.3.3. Buffer Inventory
Executing any job in which data is passed between the peers requires the requester to create a buffer inventory using doca_buf_inventory_create() and start it using doca_buf_inventory_start().
5.1.3.4. DOCA Core Object for RDMA Operations Summary
Summary of the minimal DOCA Core object requirements for each RDMA operation:
| DOCA RDMA Job Type | Minimal Permissions | Should ExportMMAP?(a) | |||
| Requester Side | Responder Side | ||||
| RDMA | MMAP | RDMA | MMAP | ||
| Read | – | Local Read Write | RDMA Read | Local Read Write | RDMA Read | Yes |
| Write/Write with Immediate | – | Local Read Write | RDMA Write | Local Read Write | RDMA Write | Yes |
| Atomic (Fetch and Add, Compare and Swap) | – | Local Read Write | RDMA Atomic | Local Read Write | RDMA Atomic | Yes |
| Send/Send with Immediate | – | Local Read Write | – | Local Read Write | No |
| Receive | Depending on the received job | Local Read Write | Not relevant | ||
5.1.4. Constructing DOCA Buffers
Before setting up and submitting an RDMA operation, users must construct the relevant DOCA buffers for the desired job by calling doca_buf_inventory_buf_by_addr(), providing addresses that exist within the memory region registered with the given memory map (local or remote).
The data address and length of the DOCA buffers may need to be set using doca_buf_set_data() as this field may affect how many bytes are transferred. For more information on the affect of the data section on each job, refer to DOCA RDMA Job Structures.
5.2. RDMA Job Cycle
Once the preparations are complete as described in Preparation, RDMA jobs can be executed on the RDMA instance.
The following subsections describe the process of submitting a job and retrieving its result.
This cycle can be repeated for each desired job and these subsections may be executed in bulk; first by constructing all the desired jobs, then submitting them, and finally retrieving their result, all under the limitation of the workq depth and the queue size.
5.2.1. Constructing and Executing DOCA RDMA Operation
To begin an RDMA operation, enqueue an RDMA job on the previously created work queue object:
-
Create the DOCA RDMA job struct that contains the relevant job details. For further information about the different jobs and how to fill the job struct, refer to DOCA RDMA Job Structures.
- Call
doca_workq_submit()to submit the RDMA operation.
5.2.2. Waiting for Job Completion
To retrieve an RDMA operation result using doca_workq_progress_retrieve(), the user must provide a doca_event structure. This structure should point to an allocated doca_rdma_result struct in its result.ptr field.
It is the user's responsibility to allocate and manage the doca_event structure as well as the doca_rdma_result.
Code example for result preparation and retrieval:
struct doca_event event = {0};
struct doca_rdma_result rdma_result;
memset(&rdma_result, 0, sizeof(rdma_result));
event.result.ptr = (void *)(&rdma_result);
doca_workq_progress_retrieve(workq, &event, DOCA_WORKQ_RETRIEVE_FLAGS_NONE);
According to the workq mode, users may detect when the RDMA operation has been completed (via doca_workq_progress_retrieve()):
- Workq operating in polling mode – periodically poll the workq until the API call indicates that a valid event has been received (i.e.,
DOCA_SUCCESSreturned). - Workq operating in event mode – while
doca_workq_progress_retrieve()does not return success as a result, perform the following loop:- Arm the workq
doca_workq_event_handle_arm(). - Wait for an event using the event handle (e.g., using
epoll_wait()). - Once the thread wakes up, call
doca_workq_event_handle_clear().
- Arm the workq
Regardless of the operating mode, once the event is successfully retrieved, the result of the operation can be read in the provided rdma_result structure. For further information about the fields of the result structure, refer to DOCA RDMA Job Result Structure.
For some of the operations, the buffer's data length field may be updated according to the written data. For further information, refer to DOCA RDMA Job Structures.
5.2.3. Error Handling
If any RDMA job fails to run, and its result is returned with an error status, the RDMA instance itself moves to an error state (DOCA_RDMA_STATE_ERROR). Once in error state, no more jobs can be submitted until an error recovery flow is performed.
To recover an RDMA instance from the error state, the context must be stopped using doca_ctx_stop(), restarted using doca_ctx_start(), and connected again as explained under Setting up and Initializing DOCA RDMA Context, including exporting the connection information and passing it between the peers.
5.3. Clean-up
This section describes the necessary steps to release all the resources allocated for executing RDMA operations.
The order in which the following subsections are presented is non-biding. The user may perform whichever clean up process suits their needs best.
5.3.1. Buffer and Buffer Inventory
- Destroy all the buffers created during the run using
doca_buf_refcount_rm()regardless of whether the operation is successful or not. - Only after all the buffers from the inventory are destroyed, destroy the buffer inventory using
doca_buf_inventory_destroy().
5.3.2. Memory Map
Both the memory map set with a local memory range and the memory map set with a remote memory range (remote MMAP), if created, must be destroyed using doca_mmap_destroy().
5.3.3. WorkQ
- Remove the workq from the RDMA context using
doca_ctx_workq_rm(). If the workq has been set to event-driven mode, do not forget to clean up any resources created (apart from DOCA resources) to support wait-for-event. - Destroy the workq with
doca_workq_destroy().
5.3.4. DOCA RDMA Context
- Stop the context using
doca_ctx_stop(). - Destroy the context using
doca_rdma_destroy().
The following examples presume that all the necessary structures and objects were initialized as described under Preparation before the example code, and that all the structures and objects are cleaned up as described under in Clean-up afterwards.
6.1. Write Job: Polling WorkQ Mode
On the receiving side, one must set the MMAP permissions to include the required RDMA operation (in this case, RDMA_WRITE) and then export and transfer the MMAP (either OOB or as a message between the peers), to the writing side.
Finally, the writing side should create an MMAP from the exported one (using doca_mmap_create_from_export()) which is referred to as remote_mmap in this code sample.
/*
* The following parameters were already initiated as part of the preparations:
* struct doca_buf_inventory *buf_inventory;
* struct doca_workq *workq;
* struct doca_ctx *rdma_ctx;
* struct doca_mmap *local_mmap;
* struct doca_mmap *remote_mmap;
* char *local_mmap_memrange;
* void *remote_addr;
*/
/* Step #1 - Declare and initiate structures */
doca_error_t status;
struct doca_buf *src_buf;
struct doca_buf *dst_buf;
struct doca_rdma_result rdma_result;
struct doca_event event = {0};
struct doca_rdma_job_read_write job_write = {0};
memset(&rdma_result, 0, sizeof(rdma_result));
event.result.ptr = (void *)(&rdma_result);
/* Step #2 - Create and a source buffer object from local mmap and prepare the data */
const char *string = "Hello World!";
size_t string_len = strlen(string) + 1;
doca_buf_inventory_buf_by_data(buf_inventory, local_mmap, local_mmap_memrange, string_len, &src_buf);
strcpy(local_mmap_memrange, string);
/* Step #3 - Create a destination buffer object from imported mmap */
doca_buf_inventory_buf_by_data(buf_inventory, remote_mmap, remote_addr, string_len, &dst_buf);
/* Step #4 - Prepare and submit the job */
job_write.base.ctx = rdma_ctx;
job_write.base.flags = DOCA_JOB_FLAGS_NONE;
job_write.base.type = DOCA_RDMA_JOB_WRITE;
job_write.src_buff = src_buf;
job_write.dst_buff = dst_buf;
doca_workq_submit(workq, (doca_job *)(&job_write));
/* Step #5 - Check for job result */
do {
status = doca_workq_progress_retrieve(workq, &event, DOCA_WORKQ_RETRIEVE_FLAGS_NONE);
} while (status == DOCA_ERROR_AGAIN);
assert(status == DOCA_SUCCESS);
assert(rdma_result.result == DOCA_SUCCESS);
remote_addr– the agreed upon address for the write operationstring_len– the agreed upon length of the data- Local MMAP range start ≤
local_mmap_memrange && local_mmap_memrange + string_len≤ local MMAP range end - Imported MMAP range start ≤
remote_addr && remote_addr + string_len≤ imported MMAP range end
6.2. Send with Immediate Job
On the receiving side, with workq in polling mode:
/*
* The following parameters were already initiated as part of the preparations:
* struct doca_buf_inventory *buf_inventory;
* struct doca_workq *workq;
* struct doca_ctx *rdma_ctx;
* struct doca_mmap *local_mmap;
* char *local_mmap_memrange;
*/
/* Step #1 - Declare and initiate structures */
doca_error_t status;
struct doca_buf *dst_buf;
struct doca_rdma_result rdma_result;
struct doca_event event = {0};
struct doca_rdma_job_recv job_recv = {0};
memset(&rdma_result, 0, sizeof(rdma_result));
event.result.ptr = (void *)(&rdma_result);
/* Step #2 - Create a destination buffer object from local mmap, to which the received data will be written */
doca_buf_inventory_buf_by_data(buf_inventory, local_mmap, local_mmap_memrange, data_len, &dst_buf);
/* Step #3 - Prepare and submit the job */
job_recv.base.ctx = rdma_ctx;
job_recv.base.flags = DOCA_JOB_FLAGS_NONE;
job_recv.base.type = DOCA_RDMA_JOB_RECV;
job_recv.dst_buff = dst_buf;
doca_workq_submit(workq, (doca_job *)(&job_recv));
/* Step #4 - Check for job result */
do {
status = doca_workq_progress_retrieve(workq, &event, DOCA_WORKQ_RETRIEVE_FLAGS_NONE);
} while (status == DOCA_ERROR_AGAIN);
assert(status == DOCA_SUCCESS);
assert(rdma_result.result == DOCA_SUCCESS);
assert(rdma_result.immediate_data == 0xDEADBEEF); // The expected immediate value, received from the remote side
assert(strcmp(local_mmap_memrange, "Hello World!") == 0); // The expected data, received from the remote side
data_len– the agreed upon data length or an upper limit for data length expected to be received- The expected values are known in this case according to the code of the sending side in this example
On the sending side, with event driven workq:
/*
* The following parameters were already initiated as part of the preparations:
* struct doca_buf_inventory *buf_inventory;
* struct doca_workq *workq;
* struct doca_ctx *rdma_ctx;
* struct doca_mmap *local_mmap;
* char *local_mmap_memrange;
*/
/* Step #1 - Set workQ to even driven mode - declare and initiate structures */
doca_event_handle_t workq_fd;
doca_event_handle_t epfd;
struct epoll_event handle_event;
struct epoll_event events_in = {EPOLLIN};
static const int no_timeout = -1;
doca_workq_set_event_driven_enable(workq, 1);
doca_workq_get_event_handle(workq, &workq_fd);
epfd = epoll_create1(0); // note that this fd should be closed at cleanup
epoll_ctl(epfd, EPOLL_CTL_ADD, workq_fd, &events_in);
doca_ctx_workq_add(rdma_ctx, workq); // note that this call can only be made after the workQ is set to event driven mode
/* Step #2 - Declare and initiate structures for job submission and retrieval of it's result */
doca_error_t status;
struct doca_buf *src_buf;
struct doca_rdma_result rdma_result;
struct doca_event event = {0};
struct doca_rdma_job_send job_send = {0};
memset(&rdma_result, 0, sizeof(rdma_result));
event.result.ptr = (void *)(&rdma_result);
/* Step #3 - Create a source buffer object from local mmap and prepare the data */
const char *string = "Hello World!";
size_t string_len = strlen(string) + 1;
doca_buf_inventory_buf_by_data(buf_inventory, local_mmap, local_mmap_memrange, string_len, &src_buf);
strcpy(local_mmap_memrange, string);
/* Step #4 - Prepare and submit the job */
job_send.base.ctx = rdma_ctx;
job_send.base.flags = DOCA_JOB_FLAGS_NONE;
job_send.base.type = DOCA_RDMA_JOB_SEND_IMM;
job_send.src_buff = src_buf;
job_send.immediate_data = 0xDEADBEEF;
doca_workq_submit(workq, (doca_job *)(&job_send));
/* Step #5 - Check for job result */
status = doca_workq_progress_retrieve(workq, &event, DOCA_WORKQ_RETRIEVE_FLAGS_NONE);
while (DOCA_ERROR_AGAIN == status) {
doca_workq_event_handle_arm(workq);
epoll_wait(epfd, &handle_event, /*maxevents=*/1, no_timeout);
doca_workq_event_handle_clear(workq, /*handle=*/0);
status = doca_workq_progress_retrieve(workq, &event, DOCA_WORKQ_RETRIEVE_FLAGS_NONE);
}
assert(status == DOCA_SUCCESS);
assert(rdma_result.result == DOCA_SUCCESS);
- MMAP range start ≤
local_mmap_memrange && local_mmap_memrange + string_len≤ MMAP range end
Notice
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation nor any of its direct or indirect subsidiaries and affiliates (collectively: “NVIDIA”) make no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assume no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.
Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.
THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.
Trademarks
NVIDIA, the NVIDIA logo, and Mellanox are trademarks and/or registered trademarks of Mellanox Technologies Ltd. and/or NVIDIA Corporation in the U.S. and in other countries. The registered trademark Linux® is used pursuant to a sublicense from the Linux Foundation, the exclusive licensee of Linus Torvalds, owner of the mark on a world¬wide basis. Other company and product names may be trademarks of the respective companies with which they are associated.
Copyright
© 2023 NVIDIA Corporation & affiliates. All rights reserved.