DeepStream-3D Custom Apps and Libs Tutorials#
ds3d framework, interfaces and custom-libs are designed for DeepStream-3D processing. ds3d is agnostic from Gstreamer/Glib frameworks. These interfaces are capable of different types of data fusion. Developers can implement different types of custom libraries for dataloader, datafilter and datarender. The interface has ABI compatible layers and modern C++ interface. Developers only need to focus on the modern C++ interface for application or custom lib development.
DS3D dataloader is loaded by GstAppSrc, enabling its utilization for depth cameras like stereo cameras and Time-of-Flight cameras to capture image/depth data or load data from the file system. Additionally, it can be employed for capturing lidar data from sensors or lidar data files.
datafilter is loaded by the nvds3dfilter Gst-plugin. It could be used for 2D depth data processing , 3D point-cloud data extraction from depth, other 2D-depth or 3D-points data filters and lidar or 3D data inference.
datarender is loaded by GstAppSink. It could be used for 2D depth rendering and 3D point-cloud and lidar data rendering. It also could be used for file dump.
DS3D Application Examples#
DeepStream-3D Multi-Modal Lidar and Camera Sensor Fusion App sample application showcases a multi-modal sensor fusion pipeline for LiDAR and camera data using the DS3D framework. There are 2 examples of multi-modal sensor fusion pipelines inside the samples. The sample app is located at
/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion.Refer to DeepStream 3D Multi-Modal Lidar and Camera Sensor Fusion App to see more details of
deepstream-3d-lidar-sensor-fusionDS3D BEVFusion pipeline shows the overview of 6-camera plus 1-LiDAR data fusion inference and rendering pipeline through
deepstream-3d-lidar-sensor-fusion.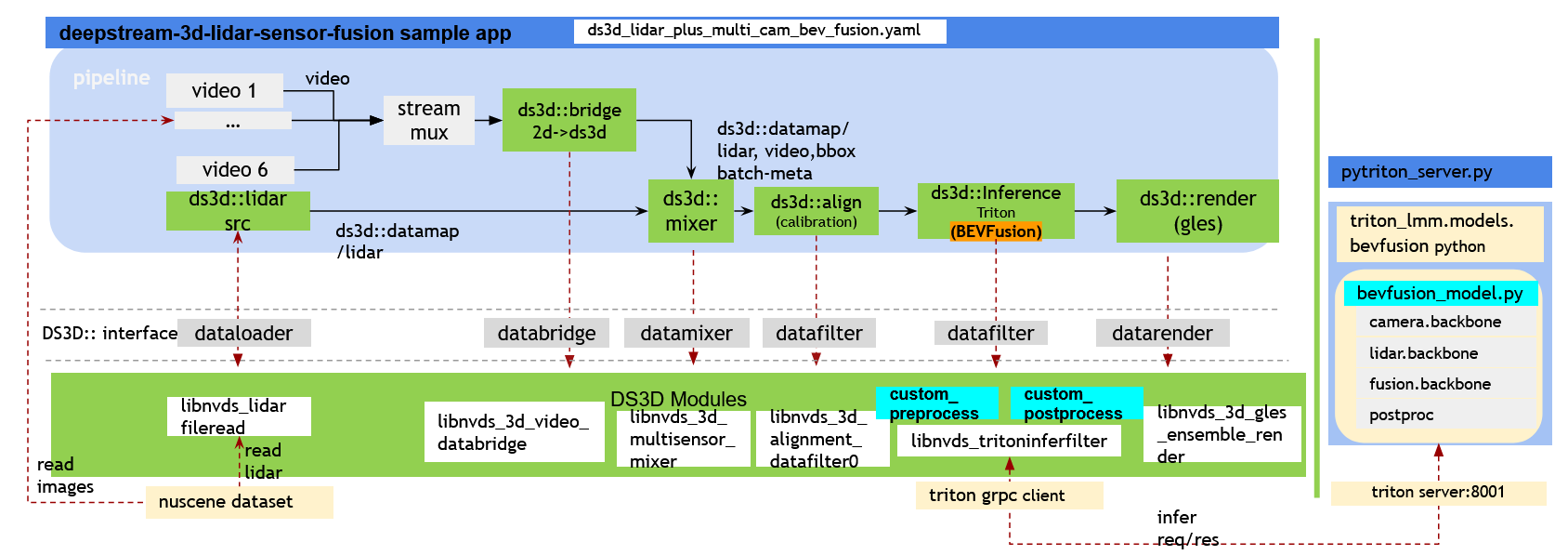
DS3D V2XFusion pipeline shows the overview of 1-camera plus 1-LiDAR with batch 4 data input fusion inference and rendering pipeline through
deepstream-3d-lidar-sensor-fusion.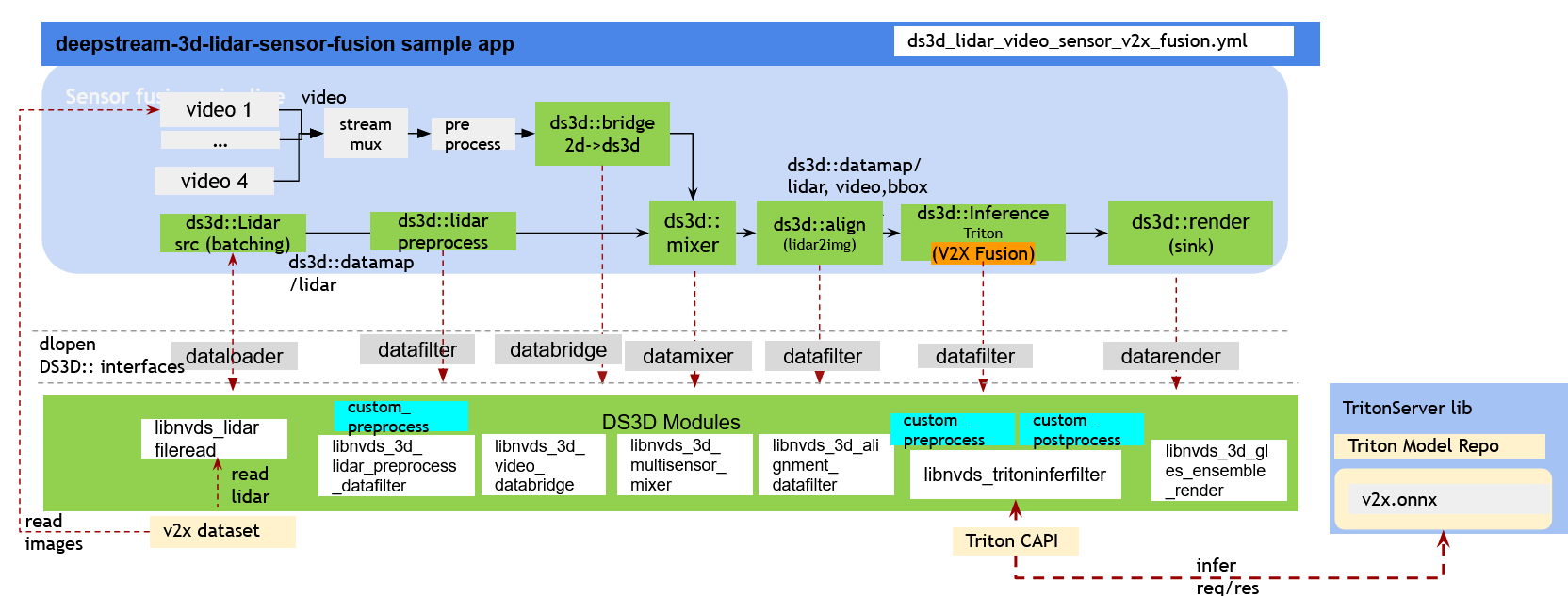
deepstream-lidar-inference has the sample code to load these custom libs and to connect these components together in simple ways. Besides that, DS3D has a simple C++ safe pointer for Gstreamer components. The interfaces are found in header files located at
/opt/nvidia/deepstream/deepstream/sources/libs/ds3d/gst/.
The image below shows the overview of lidar 3D data inference and rendering pipeline in
deepstream-lidar-inference.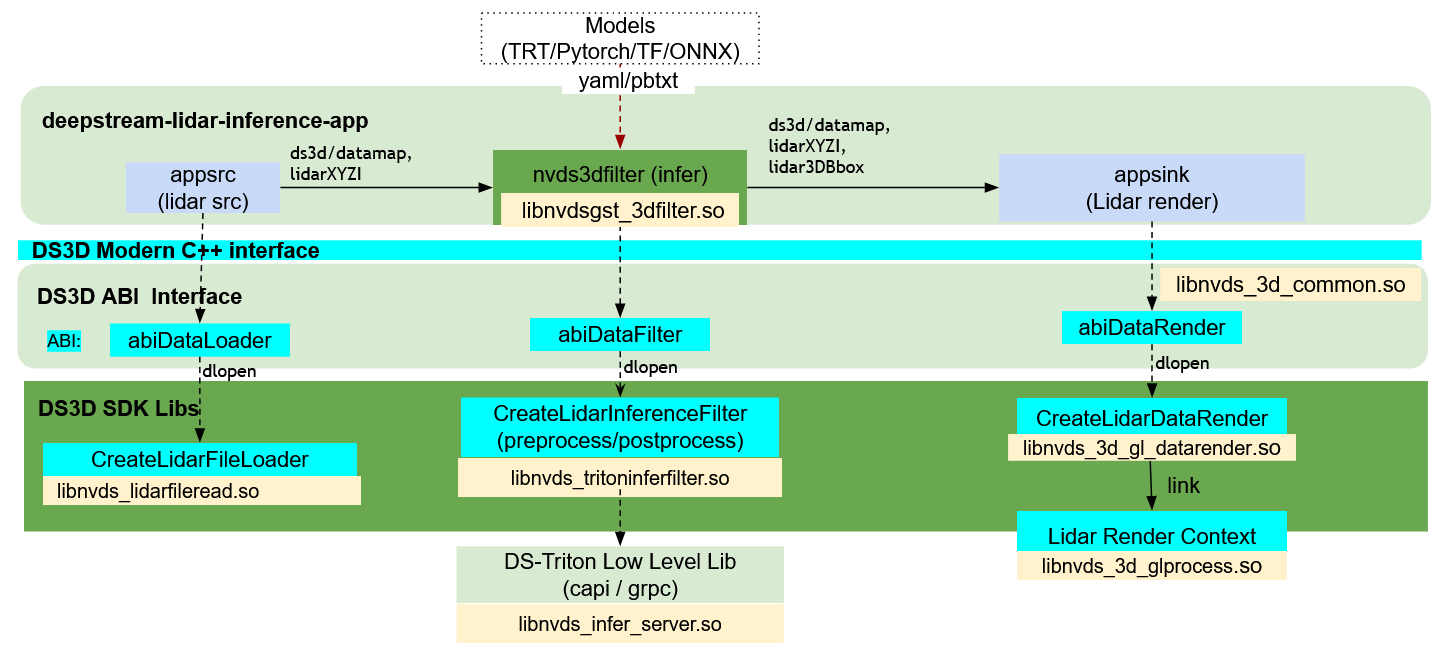
See more details in the DeepStream 3D Lidar Inference App.
deepstream-3d-depth-camera is another example for ds3d pipeline.
The image below shows the overview of depth to 3D point processing pipeline in
deepstream-3d-depth-camera.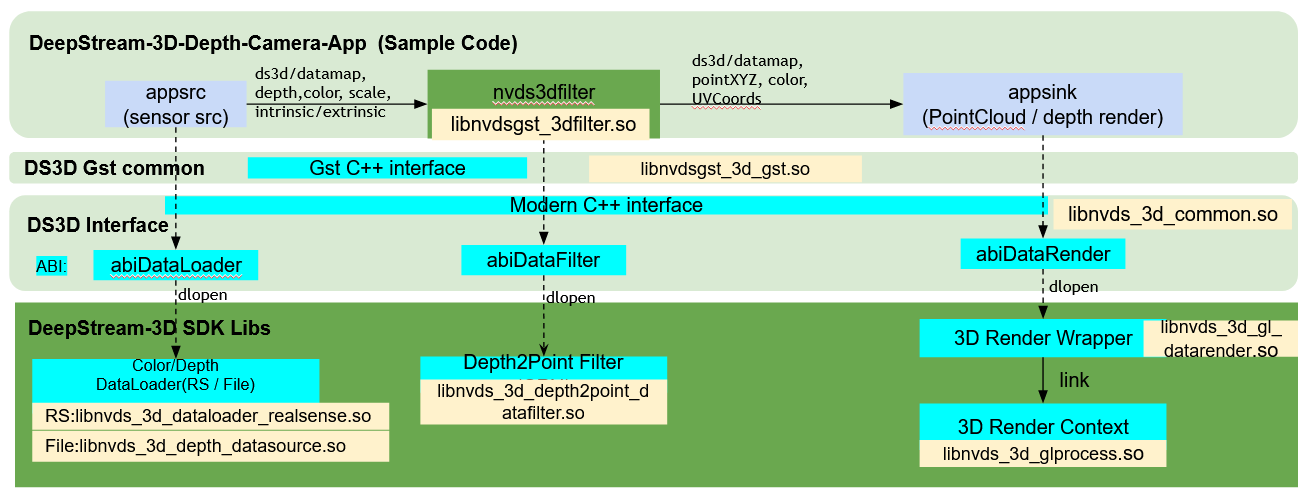
See more details in the DeepStream 3D Depth Camera App.
All the components are configured in YAML format. They are loaded by Gst-plugins.There are 3 major components, they may all be loaded into the deepstream pipeline.
DS3D data format ds3d/datamap#
ds3d/datamap recognizes the data format used in DS3D framework. Data buffers flowing between GStreamer plugins will be of this data-type.
ds3d/datamap are key-value pairs where key is a string and value, a pointer, structure or tensor frame to data.
All of the operations on the buffer is managed by GuardDataMap.
Examples:
Create GuardDataMap
datamapand set scaler key-values.#include <ds3d/common/hpp/datamap.hpp> using namespace ds3d; GuardDataMap datamap(NvDs3d_CreateDataHashMap(), true); // creat a empty datamap TimeStamp ts{0}; datamap.setData("DS3D::Timestamp", ts); // set timestamp float score = 0.1; datamap.setData("DS3D::Score", score); // copy score into datamap
User-defined structure added into ds3d
datamap.ds3d datamap requires each data type having a
typeid: uint64_tbefore adding the data into datamap. This could prevent any wrong datatype casting in runtime. To achieve that, there are 2 ways to enable a typeid for a structure.Example 1, use
REGISTER_TYPE_IDdirectly in custom data structure definition. this is mostly used when users define a new structure.#define DS3D_TYPEID_TIMESTAMP 0x20002 struct TimeStamp { uint64_t t0 = 0; uint64_t t1 = 0; uint64_t t2 = 0; REGISTER_TYPE_ID(DS3D_TYPEID_TIMESTAMP) }; // Add the shared_ptr into datamap std::shared_ptr<TimeStamp> timePtr(new TimeStamp); datamap.setPtrData("DS3D::Timestamp0", timePtr); // Add a copy of the TimeStamp into datamap TimeStamp time1; datamap.setData("DS3D::Timestamp1", time1);
Example 2, Instantiate template
struct TpId<> { static constexpr TIdType __typeid(); }, this is helpful when adding a 3rdparty data structure into datamap and not able to modify the 3rd-party existing DataStructure.// this is the 3rd-party structure struct Existing3rdpartData { float v0; int v1; }; // derive ds3d::__TypeID for any 3rdparty data structure. #include "ds3d/common/type_trait.h" #define DS3D_TYPEID_EXISTING_3RDPART_DATA 0x80001 namespace ds3d { template <> struct TpId<Existing3rdpartData>: __TypeID<DS3D_TYPEID_EXISTING_3RDPART_DATA> {}; } // Add the shared_ptr into datamap std::shared_ptr<Existing3rdpartData> dataPtr(new Existing3rdpartData); datamap.setPtrData("3rdpartyData0", dataPtr); // Add a copy of the Existing3rdpartData into datamap Existing3rdpartData data3rdparty{0.0f, 0}; datamap.setData("3rdpartyData1", data3rdparty);
Create LiDAR tensor frame and add into GuardDataMap
datamap.std::vector<vec4f> lidardata = { {{-5.0f, -5.0f, -3.0f, 0.6f}}, {{-5.0f, -5.0f, -3.0f, 0.85f}}, {{1.0f, 0.5f, -1.0f, 0.82f}}, {{-5.0f, -5.0f, -3.0f, 0.8f}}, }; void* pointPtr = (void*)(&lidardata[0]); uint32_t pointsN = lidardata.size(); FrameGuard lidarFrame = wrapLidarXYZIFrame<float>( (void*)pointPtr, pointsN, MemType::kCpu, 0, [holder = std::move(lidardata)](void*) {}); // lambda deleter const std::string keyName = "DS3D::LidarXYZI"; // user define a key name. // setGuardData holds a reference_count on the lidarFrame without deep-copy datamap.setGuardData(keyName, lidarFrame);
Create 2D-Image tensor frame and add into GuardDataMap
datamap.std::vector<vec4b> imagedata = { {{255, 0, 0, 255}}, {{0, 255, 0, 255}}, {{0, 255, 0, 255}}, {{0, 0, 255, 255}}, {{255, 255, 0, 255}}, {{0, 255, 0, 255}}, }; uint32_t width = 3, height = 2; Frame2DPlane colorPlane = {width, height, (uint32_t)sizeof(vec4b) * width, sizeof(vec4b), 0}; void* colorPtr = (void*)(&imagedata[0]); uint32_t bytes = colorPlane.pitchInBytes * colorPlane.height; Frame2DGuard imageFrame = impl::Wrap2DFrame<uint8_t, FrameType::kColorRGBA>( colorPtr, {colorPlane}, bytes, MemType::kCpu, 0, [holder = std::move(imagedata)](void*) {}); // lambda deleter const std::string keyName = "DS3D::ColorFrame"; // user define a key name. // setGuardData holds a reference_count on the imageFrame without deep-copy datamap.setGuardData(keyName, imageFrame);
Create custom shaped tensor frame and add into GuardDataMap
datamap.std::vector<float> tensordata = { 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11.0f }; void* tensorPtr = (void*)(&tensordata[0]); Shape tensorShape{3, {1, 3, 4}}; // tensor shape (1, 3, 4) uint32_t bytes = tensordata.size() * sizeof(tensordata[0]); FrameGuard tensorFrame = impl::WrapFrame<float, FrameType::kCustom>( tensorPtr, bytes, tensorShape, MemType::kCpu, 0, [holder = std::move(imagedata)](void*) {}); // lambda deleter const std::string keyName = "DS3D::dataarray"; // user define a key name. // setGuardData holds a reference_count on the tensorFrame without deep-copy datamap.setGuardData(keyName, tensorFrame);
Query data values from GuardDataMap
datamapGuardDataMap::getGuardData, return a safe reference counted guard data GuardDataT<DataStructure> e.g. Frame2DGuard, FrameGuard, GuardDataT<TimeStamp>GuardDataMap::getPtrData, return a reference counted std::shared_ptr<DataStructure> e.g. std::shared_ptr<TimeStamp>GuardDataMap::getData, return a copy of the DataStructure. e.g. TimeStamp// example to use different ways to get timestamp. std::string timeKey = "DS3D::Timestamp"; if (datamap.hasData(timeKey)) { // get a COPY of Timestamp TimeStamp t0; DS_ASSERT(isGood(datamap.getData(timeKey, t0)); // get a std::shared_ptr of Timestamp std::shared_ptr<TimeStamp> tPtr; DS_ASSERT(isGood(datamap.getPtrData(timeKey, tPtr)); // get a reference-counted GuardDataT<Timestamp> GuardDataT<TimeStamp> timeGuard; DS_ASSERT(isGood(datamap.getPtrData(timeKey, timeGuard)); // example to get a lidar tensor frame FrameGuard pointFrame; std::string lidarKey = "DS3D::LidarXYZI"; if (datamap.hasData(lidarKey)) { // get lidar tensor frame // pointFrame holds a reference count DS_ASSERT(isGood(dataMap.getGuardData(lidarKey, pointFrame))); DataType dType = pointFrame->dataType(); FrameType frameType = pointFrame->frameType(); MemType memType = pointFrame->memType(); Shape pShape = pointFrame->shape(); void *dataPtr = pointFrame->base(); size_t dataBytes = pointFrame->bytes(); } // example to get a RGBA image tensor frame Frame2DGuard rgbaImage; std::string imageKey = "DS3D::ColorFrame"; if (datamap.hasData(imageKey)) { // get 2D image tensor frame // rgbaImage holds a reference count DS_ASSERT(isGood(dataMap.getGuardData(imageKey, rgbaImage))); DataType dType = rgbaImage->dataType(); FrameType frameType = rgbaImage->frameType(); MemType memType = rgbaImage->memType(); Shape pShape = rgbaImage->shape(); void *dataPtr = rgbaImage->base(); size_t dataBytes = rgbaImage->bytes(); DS_ASSERT(rgbaImage->planes() == 1); // RGBA image has 1 plane. Frame2DPlane plane = rgbaImage->getPlane(0); } // example to get a custom shaped tensor frame, e.g. data_array FrameGuard tensorFrame; std::string tensorKey = "DS3D::dataarray"; if (datamap.hasData(tensorKey)) { // get any tensor frame // tensorFrame holds a reference count DS_ASSERT(isGood(dataMap.getGuardData(tensorKey, tensorFrame))); DataType dType = tensorFrame->dataType(); FrameType frameType = tensorFrame->frameType(); MemType memType = tensorFrame->memType(); Shape pShape = tensorFrame->shape(); void *dataPtr = tensorFrame->base(); size_t dataBytes = tensorFrame->bytes(); }
DS3D DataMap interoperate with GstBuffer#
DS3D DataMap has ABI-compatible class ds3d::abiRefDataMap. With that, NvDs3DBuffer is defined for storing DS3D datamap along with GstBuffer. Header file is ds3d/gst/nvds3d_meta.h.
struct NvDs3DBuffer { uint32_t magicID; // must be 'DS3D' ds3d::abiRefDataMap* datamap; };
Warning
Do not use the datamap directly. The easy and safe way to access that is through GuardDataMap. see examples below
Example to get datamap from
GstBuffer
#include <ds3d/common/hpp/datamap.hpp> #include <ds3d/common/hpp/frame.hpp> using namespace ds3d; GstBuffer *gstBuf = ; // get the gstBuf from probe function or Gstreamer plugins if (NvDs3D_IsDs3DBuf(gstBuf)) { const abiRefDataMap* refDataMap = nullptr; ErrCode c = NvDs3D_Find1stDataMap(gstBuf, refDataMap); if (refDataMap) { GuardDataMap dataMap(*refDataMap); FrameGuard lidarFrame; c = dataMap.getGuardData("DS3D::LidarXYZI", pointFrame); // get lidar points reference. FrameGuard uvCoord; c = dataMap.getGuardData("DS3D::TextureCoordKey", uvCoord); // get 3D points UV coordinates reference. Frame2DGuard depthFrame; c = dataMap.getGuardData("DS3D::DepthFrame", depthFrame); // get depth frame reference. DepthScale scale; c = dataMap.getData("DS3D::DepthScaleUnit", scale); // copy depth scale } }
Example to create a
ds3d::datamapinto a newGstBuffer#include <ds3d/common/hpp/datamap.hpp> #include <ds3d/common/hpp/frame.hpp> #include <ds3d/common/impl/impl_frames.h> GuardDataMap datamap(NvDs3d_CreateDataHashMap(), true); // set true to take the reference ownership. /* Create color image frame and store them into ds3d datamap. */ // Assume format is RGBA { Frame2DPlane colorPlane = {1920, 1080, 1920 * sizeof(uint8_t) , sizeof(uint8_t), 0}; uint32_t colorBytesPerFrame = colorPlane.pitchInBytes * colorPlane.height; std::vector<uint8_t> data(colorBytesPerFrame); // Image data void* dataPtr = &data[0]; // create color 2D frame Frame2DGuard frame = Wrap2DFrame<uint8_t, FrameType::kColorRGBA>( dataPtr, {_config.colorPlane}, bytesPerFrame, MemType::kCpu, 0, [data = std::move(data)](void*) {}); c = datamap.setGuardData(kColorFrame, colorFrame); // store colorFrame reference into datamap. ... // check error code }
Once
datamapis ready, you can create a new GstBuffer with DS3D datamap.// ``GuardDataMap datamap`` is ready GstBuffer* gstBuf = nullptr; ErrCode c = NvDs3D_CreateGstBuf(gstBuf, datamap.abiRef(), false); // set false to increase reference count. ... // check error code
Example to update an existing
DS3DGstBuffer with a newds3ddatamap.// Assume ``GuardDataMap datamap`` is ready // Assume ``GstBuffer* gstBuf`` is created by another component ErrCode c = NvDs3D_UpdateDataMap(gstBuf, datamap.abiRef(), false); // set false to increase reference count. ... // check error code
ds3d::dataloader - Load Custom Lib for Data Capture#
Load and Manage DS3D Dataloader#
Examples:
name: realsense_dataloader
type: ds3d::dataloader
out_caps: ds3d/datamap
custom_lib_path: libnvds_3d_dataloader_realsense.so
custom_create_function: createRealsenseDataloader
config_body:
streams: [color, depth]
A custom dataloader must have type: ds3d::dataloader. It is created by explicit call of NvDs3D_CreateDataLoaderSrc(srcConfig, loaderSrc, start) with the full component YAML content. During this call, the custom_lib_path is loaded and a specific data loader is created via custom_create_function. A GstAppsrc object is also created into loaderSrc.gstElement.
GstAppsrc manages the ds3d::dataloader dataflows. This ds3d::dataloader component could be started automatically by gst-pipeline or manually by the application call.
GuardDataLoader dataloader = loaderSrc.customProcessor;
ErrCode c = dataloader.start();
To stop the dataloader, user can set GstAppsrc states to GST_STATE_READY or stop it manually.
GuardDataLoader dataloader = loaderSrc.customProcessor;
ErrCode c = dataloader.stop();
DS3D Dataloader in DeepStream User Application#
DS3D Custom Dataloaders are agnostic from Gstreamer/Glib Framework. But it could be working with Gstramer as well. The ds3d::dataloader could interactively work with GstAppSrc together. They could be created by NvDs3D_CreateDataLoaderSrc.
Examples:
#include <ds3d/common/config.h>
#include <ds3d/gst/nvds3d_gst_plugin.h>
std::string yamlStr = R"(
name: ds3d_lidar_file_source
type: ds3d::dataloader
out_caps: ds3d/datamap
custom_lib_path: libnvds_lidarfileread.so
custom_create_function: createLidarFileLoader
config_body:
data_config_file: lidar_data_list.yaml
points_num: 242180
mem_type: gpu # choose [cpu gpu]
gpu_id: 0
mem_pool_size: 6
element_size: 4
output_datamap_key: DS3D::LidarXYZI
)";
ErrCode c = ErrCode::kGood;
ComponentConfig config;
c = parseComponentConfig(yamlStr.c_str(), "./config_lidar_loader.yaml", config);
DS_ASSERT(config.type == ComponentType::kDataLoader);
DS_ASSERT(config.customLibPath == "libnvds_lidarfileread.so");
DS_ASSERT(config.customCreateFunction == "createLidarFileLoader");
gst::DataLoaderSrc appLoader;
c = NvDs3D_CreateDataLoaderSrc(c, appLoader, true);
// get DS3D custom dataloader.
GuardDataLoader dataLoader = appLoader.customProcessor;
// get GstAppSrc from this appLoader;
GstElement* appsrc = appLoader.gstElement.get();
// gstreamer pipeline setup and running.
// during each read_data from GstAppSrc callback. it would simultaneously reading data from dataloader
// GuardDataMap datamap;
// dataloader.read_data(datamap);
// DS3D dataloader would stop qutomatically when Gstpipeline is stopped.
// But in the case if user want to stop it early or manually.
// Obtain DS3D custom dataloader and stop manually.
c = dataloader.flush();
c = dataloader.stop();
GuardDataLoader provides safe access to abiDataLoader. Once it’s created, it will maintain the reference pointer to the dataloader.
Implement a DS3D Custom Dataloader#
Examples:
#include <ds3d/common/impl/impl_dataloader.h>
class TestTimeDataLoader : public ds3d::impl::SyncImplDataLoader {
public:
TestTimeDataLoader() = default;
protected:
ErrCode startImpl(const std::string& content, const std::string& path) override
{
setOutputCaps("ds3d/datamap");
return ErrCode::kGood;
}
ErrCode readDataImpl(GuardDataMap& datamap) override
{
datamap.reset(NvDs3d_CreateDataHashMap());
static uint64_t iTime = 0;
TimeStamp t{iTime++, 0, 0};
datamap.setData("time", t);
emitError(ErrCode::kGood, "timestamp added");
return ErrCode::kGood;
}
ErrCode stopImpl() override { return ErrCode::kGood; }
ErrCode flushImpl() override { return ErrCode::kGood; }
};
DS3D_EXTERN_C_BEGIN
DS3D_EXPORT_API abiRefDataLoader*
createTestTimeDataloader()
{
return NewAbiRef<abiDataLoader>(new TestTimeDataLoader);
}
DS3D_EXTERN_C_END
A shown in the example above, You’ll need to derive dataloader from the ds3d::impl::SyncImplDataLoader class, and implement interfaces for the following:
ErrCode startImpl(const std::string& content, const std::string& path) override; ErrCode readDataImpl(GuardDataMap& datamap) override; ErrCode stopImpl() override; ErrCode flushImpl() override;
ds3d::databridge - Loads Custom Lib for data conversion to and from DS3D.#
This plugin and custom lib helps convert data type to and from ds3d/datamap
More details: Gst-nvds3dbridge.
ds3d::datafilter- DS3D Custom DataFilter#
DS3D DataFilter is processing inputs from ds3d::datamap and producing outputs input new ds3d::datamap. Users can implement custom datafilter lib for their own use case.
Create And Manage DS3D Datafilter in DeepStream App#
Examples:
#include <ds3d/common/config.h>
#include <ds3d/gst/nvds3d_gst_ptr.h>
#include <ds3d/gst/nvds3d_gst_plugin.h>
std::string yamlStr = R"(
name: fusion_inference
type: ds3d::datafilter
in_caps: ds3d/datamap
out_caps: ds3d/datamap
custom_lib_path: libnvds_tritoninferfilter.so
custom_create_function: createLidarInferenceFilter
config_body:
mem_pool_size: 2
model_inputs:
config_file: model_config_files/config_triton_bev_fusion_infer_grpc.pbtxt
- name: input_image_0
datatype: UINT8
shape: [1, 900, 1600, 4]
from: DS3D::ColorFrame_0+1
is_2d_frame: true
- name: input_lidar
datatype: FP32
shape: [242180, 4]
from: DS3D::LidarXYZI+0
)";
gst::ElePtr gstPlugin = gst::elementMake("nvds3dfilter", "ds3d-custom-filter");
g_object_set(G_OBJECT(gstPlugin.get()), "config-content", yamlStr.c_str(), nullptr);
GstElement* ele = gstPlugin.get();
A custom datafilter must have type: ds3d::datafilter. It is loaded through the nvds3dfilter Gst-plugin. It is started by gst_element_set_state(GST_STATE_READY). During this call, the custom_lib_path is loaded and a specific data filter is created by custom_create_function. nvds3dfilter Gst-plugin has config-content and config-file properties. One of them must be set to create a datafilter object.
Implement a Custom DS3D Datafilter#
Examples:
#include <ds3d/common/impl/impl_datafilter.h>
class TestFakeDataFilter : public impl::BaseImplDataFilter {
public:
TestFakeDataFilter() = default;
protected:
ErrCode startImpl(const std::string& content, const std::string& path) override
{
setInputCaps(kFakeCapsMetaName);
setOutputCaps(kFakeCapsMetaName);
return ErrCode::kGood;
}
ErrCode processImpl(
GuardDataMap datamap, OnGuardDataCBImpl outputDataCb,
OnGuardDataCBImpl inputConsumedCb) override
{
DS_ASSERT(datamap);
TimeStamp t;
ErrCode c = datamap.getData("time", t);
if (!isGood(c)) {
return c;
}
t.t0 += 1;
inputConsumedCb(ErrCode::kGood, datamap);
c = datamap.setData("time", t);
if (!isGood(c)) {
return c;
}
outputDataCb(ErrCode::kGood, datamap);
return ErrCode::kGood;
}
ErrCode flushImpl() override { return ErrCode::kGood; }
ErrCode stopImpl() override { return ErrCode::kGood; }
};
DS3D_EXTERN_C_BEGIN
DS3D_EXPORT_API abiRefdatafilter*
createTestFakeDatafilter()
{
return NewAbiRef<abidatafilter>(new TestFakeDataFilter);
}
DS3D_EXTERN_C_END
As shown in the example above, you’ll need to derive the datafilter from the ds3d::impl::BaseImplDataFilter class, and implement interfaces for the following:
ErrCode startImpl(const std::string& content, const std::string& path) override;
ErrCode processImpl(
GuardDataMap datamap, OnGuardDataCBImpl outputDataCb,
OnGuardDataCBImpl inputConsumedCb) override;
ErrCode stopImpl() override;
ErrCode flushImpl() override;
To load this custom lib through nvds3dfilter Gst-plugin, you’ll also need to export a specific symbol createTestFakeDatafilter.
ds3d::datarender - Loads DS3D Custom DataRender#
DS3D Custom DataRenders are agnostic from Gstreamer/Glib Framework. But it could be working with Gstramer as well. The ds3d::datarender could interactively work with GstAppSink together. They could be created by NvDs3D_CreateDataRenderSink.
Examples:
Load And Manage DS3D Datarender#
Examples:
#include <ds3d/common/config.h>
#include <ds3d/gst/nvds3d_gst_plugin.h>
std::string yamlStr = R"(
name: lidar_render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createLidarDataRender
gst_properties:
sync: True
async: False
drop: False
config_body:
title: ds3d-lidar-render
streams: [lidardata]
width: 1280
height: 720
block: True
view_position: [0, 0, 60]
view_target: [0, 0, 0]
view_up: [0, 1, 0]
near: 0.3
far: 100
fov: 50
lidar_color: [0, 255, 0]
lidar_data_key: DS3D::LidarXYZI
element_size: 4
lidar_bbox_key: DS3D::Lidar3DBboxRawData
enable_label: True
)";
ErrCode c = ErrCode::kGood;
ComponentConfig config;
c = parseComponentConfig(yamlStr.c_str(), "./config_lidar_loader.yaml", config);
DS_ASSERT(config.type == ComponentType::kDataRender);
DS_ASSERT(config.customLibPath == "libnvds_3d_gl_datarender.so");
DS_ASSERT(config.customCreateFunction == "createLidarDataRender");
gst::DataRenderSink appRender;
c = NvDs3D_CreateDataRenderSink(config, appRender, true);
// get DS3D custom datarender.
GuardDataRender datarender = appRender.customProcessor;
// get GstAppSink from this appRender;
GstElement* appsink = appRender.gstElement.get();
// gstreamer pipeline setup and running.
// during each render_data from GstAppSink callback. it would simultaneously reading data from datarender
// datarender.render(datamap, consumed_callback);
// DS3D datarender would stop qutomatically when Gstpipeline is stopped.
// But in the case if user want to stop it early or manually.
// Obtain DS3D custom datarender and stop manually.
c = datarender.stop();
A custom datarender must have type: ds3d::datarender. It is created by explicit call of NvDs3D_CreateDataRenderSink(sinkConfig, renderSink, start) with the full component YAML content. During this call, the custom_lib_path is loaded and a specific data loader is created via custom_create_function. A GstAppsink object is also created into renderSink.gstElement.
GstAppsink manages the ds3d::datarender dataflows. This ds3d::datarender component could be automatically started by the gst-pipeline, or manually by the application call.
GuardDataRender datarender = renderSink.customProcessor; ErrCode c = datarender.start();
To stop the datarender, you can set GstAppsink states to GST_STATE_READY, or stop manually.
.. code-block:: text
GuardDataRender datarender = renderSink.customProcessor; ErrCode c = datarender.stop();
GuardDataRender provides safe access to abidatarender. Once it’s created, it will maintain the reference pointer to datarender. preroll is called only once to initialize some resources.
Implement a DS3D Custom Datarender#
Examples:
#include <ds3d/common/impl/impl_datarender.h> class TestFakeDataRender : public impl::BaseImplDataRender { public: TestFakeDataRender() = default; protected: ErrCode startImpl(const std::string& content, const std::string& path) override { setInputCaps("ds3d/datamap"); return ErrCode::kGood; } ErrCode prerollImpl(GuardDataMap datamap) override { return ErrCode::kGood; } ErrCode renderImpl(GuardDataMap datamap, OnGuardDataCBImpl dataDoneCb) override { DS_ASSERT(datamap); emitError(ErrCode::kGood, "data rendered"); dataDoneCb(ErrCode::kGood, datamap); return ErrCode::kGood; } ErrCode flushImpl() override { return ErrCode::kGood; } ErrCode stopImpl() override { return ErrCode::kGood; } }; DS3D_EXTERN_C_BEGIN DS3D_EXPORT_API abiRefdatarender* createTestFakedatarender() { return NewAbiRef<abiDataRender>(new TestFakeDataRender()); } DS3D_EXTERN_C_END
As shown in the example above, you’ll need to derive datarender from the ds3d::impl::BaseImplDataRender class, and implement interfaces for the following:
ErrCode startImpl(const std::string& content, const std::string& path) override; ErrCode prerollImpl(GuardDataMap datamap) override; ErrCode renderImpl(GuardDataMap datamap, OnGuardDataCBImpl dataDoneCb) override; ErrCode stopImpl() override; ErrCode flushImpl() override;
To load this custom lib through NvDs3D_CreateDataRenderSink, you’ll also need to export a specific symbol createTestFakedatarender.
Custom Libs Configuration Specifications#
Components Common Configuration Specifications#
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
type |
Custom processor type |
String, [ds3d::dataloader, ds3d::datafilter, ds3d::datarender] |
type: ds3d::dataloader |
name |
Indicate user-defined component name |
String |
name: depthloader |
in_caps |
Indicate Gst sink caps for the component |
String |
in_caps: ds3d/datamap |
out_caps |
Indicate Gst sink caps for the component |
String |
out_caps: ds3d/datamap |
custom_lib_path |
Indicate custom lib path |
String |
custom_lib_path: libnvds_3d_gl_datarender.so |
custom_create_function |
Indicate custom function to create the specific ds3d processing component |
String |
custom_create_function: createPointCloudDataRender |
config_body |
Indicate YAML specific content for the custom component |
String |
|
These custom libs are part of DeepStream release package.
Supported DS3D Custom Process libraries#
DS3D Process Type |
Functionality |
DS3D custom library |
DS3D Creating Instance Function |
Description |
|---|---|---|---|---|
dataloader |
lidar-file-reader |
libnvds_lidarfileread.so |
|
Lidar file data reader library, see details in Custom Dataloader libnvds_lidarfileread Configuration Specifications |
dataloader |
realsense camera depth/image capture |
libnvds_3d_dataloader_realsense.so |
|
RealSense Camera capture dataloader library, see details in Custom Dataloader libnvds_3d_dataloader_realsense Configuration Specifications |
datafilter |
multi sensor triton inference lib |
libnvds_tritoninferfilter.so |
|
Multi-modal sensor triton inference library, see details in libnvds_tritoninferfilter Configuration Specifications |
datafilter |
data_alignment |
libnvds_3d_alignment_datafilter.so |
|
lidar/camera Sensor Intrinsic and Extrinsic parameters and alignment, see details in Custom ds3d::datafilter library: libnvds_3d_alignment_datafilter.so |
datafilter |
lidar_data_preprocess |
libnvds_3d_lidar_preprocess_datafilter.so |
|
lidar data voxel processing, see details in Custom Datafilter libnvds_3d_lidar_preprocess_datafilter Specifications |
datafilter |
depth-to-point-cound |
libnvds_3d_depth2point_datafilter.so |
|
Convert Image Depth data into 3D Point Cloud data, see details in Custom datafilter libnvds_3d_depth2point_datafilter Configuration Specifications |
databridge |
bridge 2D into DS3D |
libnvds_3d_video_databridge.so |
|
Convert DeepStream 2D batchmeta and surface into |
datamixer |
mixer for video and lidar/radar |
libnvds_3d_multisensor_mixer.so |
|
Combines video data (2D) and LiDAR data (3D) into a single |
datarender |
3D multiview scene render |
libnvds_3d_gles_ensemble_render.so |
|
Renders a 3D multi-view scene using GLES with with various elements (textures, LiDAR points, bounding boxes) inside |
datarender |
3D point-cloud data render with texture |
libnvds_3d_gl_datarender.so |
|
Renders 3D(Scene construction) PointCould(XYZ) data with RGBA color textures inside |
datarender |
3D lidar(XYZI/XYZ) data render |
libnvds_3d_gl_datarender.so |
|
Renders 3D Lidar(XYZI/XYZ) data inside |
datarender |
depth image 2D render |
libnvds_3d_gl_datarender.so |
|
Renders 2D depth and Camera RGBA data inside |
libnvds_tritoninferfilter Configuration Specifications#
Multi-modal tensors Triton inference with key-value pairs in ds3d::datamap, Supports user defined custom preprocess and postprocess.
Configuration for multi-modal triton inference Header:
name: multimodal_triton_infer type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_tritoninferfilter.so custom_create_function: createLidarInferenceFilter
Config body specifications
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
in_streams |
which data type will be processed |
List of String, Optional |
in_streams: [lidar] |
gpu_id |
GPU device ID |
Integer, default value:0 |
gpu_id: 0 |
config_file |
nvinferserver(triton) low level lib config file, supports gRPC and CAPI, see more details Low Level libnvds_infer_server.so Configuration File Specifications |
String of Path |
config_file: model_config_files/config_triton_bev_fusion_infer_grpc.pbtxt |
mem_pool_size |
Size of the input tensor pool |
Integer |
mem_pool_size: 8 |
model_inputs |
model ‘s input layers information, If there is no custom_preprocess defined, inferencefilter would forward the key-value frames from |
List of Dict |
|
input_tensor_mem_type |
input tensor memory type after preprocess |
String:[GpuCuda CpuCuda] |
input_tensor_mem_type: GpuCuda |
custom_preprocess_lib_path |
custom preprocessing library path |
String |
custom_preprocess_lib_path: /opt/nvidia/deepstream/deepstream/lib/libnvds_lidar_custom_preprocess_impl.so |
custom_preprocess_func_name |
customized preprocessing function name |
String |
custom_preprocess_func_name: CreateInferServerCustomPreprocess |
postprocess |
User defined postprocessing information |
Dict |
|
labels |
User defined labels for custom postprocess |
List of Dict |
|
model_inputs has all input layers information. If there is custom preprocess function/lib specified inside config body. The lib would search from keyname of the input ds3d::datamap, and forward the frame/tensor data into Triton server’s input tensors. The from keyname must be a frame, 2D-frame or tensor inside the ds3d::datamap
Configuration Specifications of the
model_inputs
Property |
Description |
Type and Range |
Example |
|---|---|---|---|
name |
Model’s input tensor name |
String |
name: input_image_0 |
datatype |
Model’s input data type |
String values in [FP32, FP16, INT8, INT32, INT16, UINT8, UINT16, UINT32, FP64, INT64, UINT64, BYTES, BOOL] |
datatype: FP32 |
shape |
Model’s input tensor shape |
List of Integer |
shape: [1, 900, 1600, 4] |
from |
The keyname of the input |
String |
from: DS3D::ColorFrame_5 |
is_2d_frame |
Indicate the |
Bool |
is_2d_frame: true |
Custom preprocess before triton inference
If custom_preprocess_lib_path and custom_preprocess_func_name are specified, Custom processing will be loaded and parse the config body and get all common and user defined information. then process each input ds3d::datamap and generate batchArray for triton inference inputs.
Users can derive interface IInferCustomPreprocessor from sources/includes/ds3d/common/hpp/lidar_custom_process.hpp
See examples in sources/libs/ds3d/inference_custom_lib/ds3d_v2x_infer_custom_preprocess/nvinferserver_custom_preprocess.cpp
#include <ds3d/common/hpp/datamap.hpp>
#include <ds3d/common/hpp/frame.hpp>
#include <ds3d/common/hpp/lidar_custom_process.hpp>
using namespace ds3d;
using namespace nvdsinferserver;
class NvInferServerCustomPreProcess : public IInferCustomPreprocessor {
public:
// process key-values from datamap and generate into model inputs batchArray.
NvDsInferStatus preproc(GuardDataMap &datamap, SharedIBatchArray batchArray, cudaStream_t stream) override {...}
};
extern "C" {
IInferCustomPreprocessor *CreateInferServerCustomPreprocess() {
return new NvInferServerCustomPreProcess();
} }
Custom postprocess after triton inference
Postprocessing is quite specific for each model. You’ll need to implement your own postprocessing functions based on inference output tensors results.
Custom postprocess libs and functions are specified from nvdsinferserver’s config. for example in apps/sample_apps/deepstream-3d-lidar-sensor-fusion/model_config_files/config_triton_bev_fusion_infer_grpc.pbtxt
infer_config {
backend {
triton {
model_name: "bevfusion"
grpc {...}
} }
extra {
output_buffer_pool_size: 4
# specify custom postprocess function
custom_process_funcion: "Nvds3d_CreateLidarDetectionPostprocess"
}
custom_lib {
# specify custom postprocess library
path: "libnvds_3d_infer_postprocess_lidar_detection.so"
}
}
An example of custom postprocess implementation is provided here: sources/libs/ds3d/inference_custom_lib/ds3d_lidar_detection_postprocess/ds3d_infer_postprocess_lidar_detection.cpp
#include "infer_custom_process.h"
#include <ds3d/common/hpp/frame.hpp>
#include <ds3d/common/hpp/datamap.hpp>
using namespace ds3d;
using namespace nvdsinferserver;
class DS3DTritonLidarInferCustomPostProcess : public IInferCustomProcessor {
public:
// process key-values from datamap and generate into model inputs batchArray.
NvDsInferStatus inferenceDone(const IBatchArray* batchArray, const IOptions* inOptions) override {
...
// get ``ds3d::datamap`` from ``inOptions``
abiRefDataMap* refDataMap = nullptr;
if (inOptions->hasValue(kLidarRefDataMap)) {
INFER_ASSERT(inOptions->getObj(kLidarRefDataMap, refDataMap) == NVDSINFER_SUCCESS);
}
GuardDataMap dataMap(*refDataMap);
...
// parsing output tensors from batchArray
TensorMap outTensors;
for (uint32_t i = 0; i < batchArray->getSize(); ++i) {
auto buf = batchArray->getSafeBuf(i);
outTensors[buf->getBufDesc().name] = buf;
}
std::vector<Lidar3DBbox> bboxes;
ret = parseLidar3Dbbox(outTensors, bboxes);
// warp data into ds3d frame ``bboxFrame``
size_t bufBytes = sizeof(Lidar3DBbox) * bboxes.size();
void* bufBase = (void*)bboxes.data();
Shape shape{3, {1, (int)bboxes.size(), sizeof(Lidar3DBbox)}};
FrameGuard bboxFrame = impl::WrapFrame<uint8_t, FrameType::kCustom>(
bufBase, bufBytes, shape, MemType::kCpu, 0, [outdata = std::move(bboxes)](void*) {});
// add key-value frame into ds3d::datamap
ErrCode code = dataMap.setGuardData(_3dBboxKey, bboxFrame);
...
return ret;
}
};
extern "C" {
IInferCustomProcessor *Nvds3d_CreateLidarDetectionPostprocess() {
return new DS3DTritonLidarInferCustomPostProcess();
} }
Custom Datafilter libnvds_3d_alignment_datafilter Specifications#
Data alignment for lidar and video data can be done using a custom library provided with DeepStreamSDK.
More details on this is here: Custom ds3d::datafilter library: libnvds_3d_alignment_datafilter.so.
Custom Datafilter libnvds_3d_lidar_preprocess_datafilter Specifications#
LiDAR data preprocess into voxel data format before V2X model sensor fusion inference.
Source files located at /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/datafilter/lidar_preprocess
Configuration for Lidar data preprocess
ds3d::datafilterHeader:name: lidarpreprocess type: ds3d::datafilter out_caps: ds3d/datamap custom_lib_path: libnvds_3d_lidar_preprocess_datafilter.so custom_create_function: createLidarPreprocessFilter
Config Body Specifications
For example:
config_body: mem_pool_size: 4 filter_input_datamap_key: DS3D::LidarXYZI_0 model_inputs: - name: feats datatype: FP16 shape: [4, 8000, 10, 9] - name: coords datatype: INT32 shape: [4, 8000, 4] - name: N datatype: INT32 shape: [4, 1] gpu_id: 0 input_tensor_mem_type: GpuCuda lidar_data_from: [DS3D::LidarXYZI_0, DS3D::LidarXYZI_1, DS3D::LidarXYZI_2, DS3D::LidarXYZI_3] output_features_tensor_key: DS3D::LidarFeatureTensor output_coords_tensor_key: DS3D::LidarCoordTensor output_num_tensor_key: DS3D::LidarPointNumTensor
Property |
Description |
Type and Range |
Example |
|---|---|---|---|
mem_pool_size |
memory buffer pool size |
Integer |
mem_pool_size: 4 |
filter_input_datamap_key |
Specify input lidar data key name |
String |
filter_input_datamap_key: DS3D::LidarXYZI_0 |
model_inputs |
Specify model input layers info |
Dict |
see example in deepstrem-3d-lidar-sensor-fusion/ds3d_lidar_video_sensor_v2xfusion.yml |
gpu_id |
Specify GPU ID |
Integer |
gpu_id: 0 |
input_tensor_mem_type |
Specify model input tensors memory type |
String, select value from [GpuCuda, CpuCuda] |
input_tensor_mem_type: GpuCuda |
lidar_data_from |
Specify lidar data key name |
List of String |
lidar_data_from: [DS3D::LidarXYZI_0] |
output_features_tensor_key |
Specify output lidar feature tensor key name |
String |
DS3D::LidarFeatureTensor |
output_coords_tensor_key |
Specify output lidar coordinate tensor key name |
String |
output_coords_tensor_key: DS3D::LidarCoordTensor |
output_num_tensor_key |
Specify keyname of numbers of ldiar data into tensor |
String |
output_num_tensor_key: DS3D::LidarPointNumTensor |
Custom Dataloader libnvds_lidarfileread Configuration Specifications#
The lib reads lidar data file frame by frame, it creates a new ds3d::datamap per frame and deliver to next component.
Source files located at /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/dataloader/lidarsource
Configuration for Lidar file reader
ds3d::dataloaderHeader:name: ds3d_lidar_file_source type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_lidarfileread.so custom_create_function: createLidarFileLoader
Config Body Specifications
For example:
config_body: data_config_file: lidar_nuscene_data_list.yaml points_num: 242180 fixed_points_num: True lidar_datatype: FP32 mem_type: gpu gpu_id: 0 mem_pool_size: 6 element_size: 4 output_datamap_key: DS3D::LidarXYZI file_loop: True
Property |
Description |
Type and Range |
Example |
|---|---|---|---|
data_config_file |
lidar data list file path |
Path String, or List of Path String |
data_config_file: lidar_data_list.yaml |
source_id |
Specify the unique source id of the loader instance |
Integer |
source_id: 0 |
points_num |
Specify point number of each frame |
Integer |
points_num: 70000 |
fixed_points_num |
Indicate the point number is always same as |
Bool |
fixed_points_num: False |
lidar_datatype |
Specify Lidar data type |
String, Only FP32 supported for now. |
lidar_datatype: FP32 |
mem_type |
Specify memory type of process data, supports [cpu, gpu] |
String, [cpu, gpu] |
mem_type: gpu |
mem_pool_size |
Specify buffer pool size allocated for frames |
Integer |
mem_pool_size: 16 |
gpu_id |
Specify GPU ID in the case of |
Integer |
gpu_id: 0 |
element_size |
Specify how manay elements will be read per each point. 3, means XYZ, 4, means XYZI. |
Integer |
element_size: 4 |
element_stride |
Specify element stride between 2 continuous points. e.g. XYZI, stride:4, XYZIT,5 |
Integer |
element_stride: 4 |
file_loop |
Indicate whether loop the file list without EOS |
Bool |
file_loop: True |
output_datamap_key |
Specify output frame keyname into the |
String or List of String |
output_datamap_key: DS3D::LidarXYZI_0 |
lidar data config file
The lib reads frames from data_config_file which is a separate file containers multiple lidar files. each lidar file is a single lidar frame file which are listed inside of source-list. Each item’s keyname is the timestamp(millisecond) of the lidar frame.
An example of data_config_file.
source-list: - 0: /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/data/nuscene/LIDAR_TOP/000000-LIDAR_TOP.bin - 50: /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/data/nuscene/LIDAR_TOP/000001-LIDAR_TOP.bin - 100: /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/data/nuscene/LIDAR_TOP/000002-LIDAR_TOP.bin
Custom Dataloader libnvds_3d_dataloader_realsense Configuration Specifications#
Configuration for Realsense Dataloader Header:
name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
libnvds_3d_dataloader_realsense.so requires you to install librealsense2 SDK. For x86, follow the instructions from IntelRealSense/librealsense.
For Jetson platform, follow the instructions from IntelRealSense/librealsense.
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
streams |
Specify which streams to enable |
List[String], select from [color, depth] |
streams: [color, depth] |
aligned_image_to_depth |
Indicate whether color image is aligned to depth |
Boolean |
aligned_image_to_depth: False |
Custom datafilter libnvds_3d_depth2point_datafilter Configuration Specifications#
Convert 2D depth data into 3D point-cloud(XYZ) data into ds3d::datamap
Configuration for Depth to Points Header:
name: depth2points
type: ds3d::datafilter
in_caps: ds3d/datamap
out_caps: ds3d/datamap
custom_lib_path: libnvds_3d_depth2point_datafilter.so
custom_create_function: createDepth2PointFilter
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
streams |
Specify which streams to enable |
List[String], select from [color, depth] |
streams: [color, depth] |
max_points |
Indicate maximum 3d points to allocate |
Uint32 |
max_points: 407040 |
mem_pool_size |
Indicate max buffer pool size |
Uint32 |
mem_pool_size: 8 |
Custom datarender libnvds_3d_gles_ensemble_render Configuration Specifications#
Renders 3D scene using OpenGL ES (GLES) with various elements (textures, LiDAR points, bounding boxes) within a single window, allowing for flexible layout customization. Users can split the windows into multiple views, and project each tensor data or frame from ds3d::datamap into a separate view or into multiple views at the same time.
It could also support overlay if multi frames rendered into a single view position overlap, it depends on the render graph order.
Configuration Header
name: ds3d_sensor_fusion_render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gles_ensemble_render.so
custom_create_function: NvDs3D_CreateGlesEnsembleRender
Configuration Body
An example of a multi-view config with render_graph. There are 2 views rendered with different frames inside the same ds3d::datamap. The 2D color image is rendered by texture3d_render into view area [0, 0, 640, 360]; The Lidar data is rendered by lidar3d_render into view area [640, 0, 1280, 360].
config_body:
window_width: 1280 # window size
window_height: 360 # window size
color_clear: true
window_title: DS3D-Lidar-6-Cameras-BEVFusion
render_graph:
- texture3d_render: # 2D texture view
layout: [0, 0, 640, 360] # layout [x0, y0, x1, y1]
max_vertex_num: 6
color_clear: false
texture_frame_key: DS3D::ColorFrame_2 # image data key
- lidar3d_render: # lidar top view
layout: [640, 0, 1280, 360] # layout [x0, y0, x1, y1]
color_clear: false
view_position: [0, 0, 30]
view_target: [0, 0, 0]
view_up: [0, 1, 0]
lidar_color: [0, 0, 255]
lidar_data_key: DS3D::LidarXYZI
lidar_bbox_key: DS3D::Lidar3DBboxRawData
element_size: 4
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
window_title |
Specify window title |
string |
window_title: DS3D-Lidar-6-Cameras-BEVFusion |
window_width |
Specify window width |
uint32 |
window_width: 1920 |
window_height |
Specify window height |
uint32 |
window_height: 1080 |
color_clear |
Specify whether to clear up the whole window when new frame arrive |
bool |
color_clear: true |
render_graph |
Specify a list of multiple renders in different views |
List[Dict] |
render_graph:
- texture3d_render:
layout: [0, 0, 640, 360]
color_clear: false
texture_frame_key: DS3D::ColorFrame
- lidar3d_render:
layout: [640, 0, 1280, 360]
color_clear: false
lidar_data_key: DS3D::LidarXYZI
|
Render graph
render_graph
It supports 2 different modes of views
texture3d_render, it renders 2D image data into a specified view area.
lidar3d_render, it renders lidar data and 3D bbox data into a specified view area.
Each mode could be configured multiple times in the same render_graph. Multiple camera data inside a single ds3d::datamap could be configured into different view area. Similarly, multiple lidar data insdie the same ds3d::datamap could also be configured at different viewpoint(topview, front-view, side-view) into different view area.
Configuration Specifications of
texture3d_render
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
layout |
Specify the view location for [x0, y0, x1, y1] |
List[Float] |
layout: [0, 0, 640, 360] x0 = 0; y0 = 0; x1 = 640; y1 = 360; |
color_clear |
Indicate whether to clear up this view before new frame came. |
bool |
color_clear: false |
texture_frame_key |
Specify texture image keyname from |
string |
texture_frame_key: DS3D::ColorFrame_1+1 |
max_vertex_num |
Specify vertex_num used for the texture drawing, default value 6 |
uint32 |
max_vertex_num: 6 |
texture_vetex_key |
Specify 3D vertex key name from |
string |
texture_vetex_key: DS3D::TextureVertexKey |
texture_coord_key |
Specify texture coordinate key name from |
string |
texture_coord_key: DS3D::TextureCoordKey |
Configuration Specifications of
lidar3d_render
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
layout |
Specify the view location for [x0, y0, x1, y1] |
List[Float] |
layout: [0, 0, 640, 360] x0 = 0; y0 = 0; x1 = 640; y1 = 360; |
color_clear |
Indicate whether to clear up this view before new frame came. |
bool |
color_clear: false |
lidar_color |
Specify lidar data color RGB |
list[uint8] |
lidar_color: [0, 0, 255] |
lidar_data_key |
Specify lidar data keyname from |
string |
lidar_data_key: DS3D::LidarXYZI+0 |
element_size |
Specify lidar data element size. choose from [3, 4], default value 4 is for xyzi. value 3 is for xyz. |
uint32 |
element_size: 4 |
lidar_bbox_key |
Specify 3D detection bounding-box key name from |
string |
lidar_bbox_key: DS3D::Lidar3DBboxRawData |
project_lidar_to_image |
Indicate whether need project lidar data and bounding-box into camera image, default value: false |
bool |
project_lidar_to_image: false |
intrinsics_mat_key |
Specify camera intrinsics matrix key name from |
intrinsics_mat_key: DS3D::Cam2_IntrinsicMatrix |
|
extrinsics_mat_key |
Specify lidar extrinsics matrix key name from |
extrinsics_mat_key: DS3D::LidarToCam2_ExtrinsicMatrix |
|
image_width |
Specify original camera intrinsic image width, this is needed when project_lidar_to_image: true |
image_width: 1600 |
|
image_height |
Specify original camera intrinsic image height, this is needed when project_lidar_to_image: true |
image_height: 900 |
|
view_position |
Specify view position [x, y, z]coordinates |
List[Float] |
view_position: [0, 0, -1] |
view_target |
Specify view target [x, y, z]coordinates |
List[Float] |
view_target: [0, 0, 1] |
view_up |
Specify view up direction [x, y, z]coordinates |
List[Float] |
view_up: [0, -1.0, 0] |
perspective_near |
Specify perspective projection near plane |
Float |
perspective_near: 0.1 |
perspective_far |
Specify perspective projection far plane |
Float |
perspective_far: 10.0 |
perspective_fov |
Specify perspective projection field of view, degree angle |
Float |
perspective_fov: 40.0 |
perspective_ratio |
Specify perspective ratio for width/height. default 0.0f means view-width/view-height |
Float |
perspective_ratio: 0.0 |
enable_label |
Indicate whether label text render enabled. default value: false |
bool |
enable_label: true |
Custom datarender libnvds_3d_gl_datarender Configuration Specifications#
Configuration Common header for libnvds_3d_gl_datarender:
name: depth-point-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so
Configuration Body for Common Part:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
title |
Specify window title |
String |
title: ds3d-point-cloud-test |
streams |
Indicate which streams to render. depth render must have [depth], 3D points render must have [points] |
List[String], select from [color, depth, points] |
streams: [color, depth] |
width |
Specify window width |
UINT32 |
width: 1280 |
height |
Specify window height |
UINT32 |
height: 720 |
block |
Indicate rendering thread as block mode |
Boolean |
block: True |
Configuration Header for Point Cloud Render:
name: point-3D-render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createPointCloudDataRender # specific function for 3D point rendering
Configuration Header for Lidar data Render:
name: lidar-data-render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createLidarDataRender # specific function for Lidar point cloud rendering
Configuration Body for 3D Point Cloud and Lidar Render Part:
For more details on 3D coordinate system, refer to https://learnopengl.com/Getting-started/Coordinate-Systems.
To know the value meanings for view_position, view_target and view_up,refer to the gluLookAt here: https://www.khronos.org/registry/OpenGL-Refpages/gl2.1/xhtml/gluLookAt.xml.
To know the value meanings for near, far and fov, refer to the gluPerspective here: https://www.khronos.org/registry/OpenGL-Refpages/gl2.1/xhtml/gluPerspective.xml.
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
view_position |
Specify view position [x, y, z]coordinates |
List[Float] |
view_position: [0, 0, -1] |
view_target |
Specify view target [x, y, z]coordinates |
List[Float] |
view_target: [0, 0, 1] |
view_up |
Specify view up direction [x, y, z]coordinates |
List[Float] |
view_up: [0, -1.0, 0] |
near |
Specify perspective projection near plane |
Float |
near: 0.01 |
far |
Specify perspective projection far plane |
Float |
far: 10.0 |
fov |
Specify perspective projection field of view, degree angle |
Float |
fov: 40.0 |
coord_y_opposite |
Specify texture map V direction, Realsense coordinates is different from GLES default coordinates |
Boolean |
coord_y_opposite: False |
positive_z_only |
Specify whether display negative depth values |
Boolean |
positive_z_only: False |
Configuration Body for Lidar Render Specific Part:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
view_position |
Specify view position [x, y, z]coordinates |
List[Float] |
view_position: [0, 0, -1] |
view_target |
Specify view target [x, y, z]coordinates |
List[Float] |
view_target: [0, 0, 1] |
view_up |
Specify view up direction [x, y, z]coordinates |
List[Float] |
view_up: [0, -1.0, 0] |
near |
Specify perspective projection near plane |
Float |
near: 0.01 |
far |
Specify perspective projection far plane |
Float |
far: 10.0 |
fov |
Specify perspective projection field of view, degree angle |
Float |
fov: 40.0 |
lidar_color |
Specify lidar data color for display |
List[Uint32] |
lidar_color: [0, 255, 0] |
element_size |
Specify lidar data element size. e.g. 4 for XYZI or 3 for XYZ |
Uint32 |
element_size: 4 |
lidar_data_key |
Specify lidar data frame in datamap, default value is DS3D::LidarXYZI |
String |
lidar_data_key: DS3D::LidarXYZI |
lidar_bbox_key |
Specify lidar 3D bounding box data in datamap, default value is DS3D::Lidar3DBboxRawData |
String |
lidar_bbox_key: DS3D::Lidar3DBboxRawData |
Configuration Header for Depth and Color 2D Render:
name: depth-2D-render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createDepthStreamDataRender # specific function for 2D depth rendering
Configuration Body for Depth and Color 2D Specific Part:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
min_depth |
Specify minimum depth value. other values less that it will be removed in rendering |
Float |
min_depth: 0.3 |
max_depth |
Specify maximum depth value. other values less that it will be removed in rendering |
Float |
max_depth: 2.0 |
min_depth_color |
Specify minimum depth rendering color in [R, G, B] |
List[Uint32] |
min_depth_color: [255, 128, 0] |
max_depth_color |
Specify maximum depth rendering color in [R, G, B] |
Float |
max_depth_color: [0, 128, 255] |
libnvds_3d_depth_datasource Depth file source Specific Configuration Specifications#
Configuration header:
name: depthfilesource
type: ds3d::dataloader
out_caps: ds3d/datamap, framerate=30/1
custom_lib_path: libnvds_3d_depth_datasource.so
custom_create_function: createDepthColorLoader
Configuration body:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
depth_source |
Specify file path for depth source |
String |
depth_source: depth_uint16_640x480.bin |
color_source |
Specify file path for color image source |
String |
color_source: color_rgba_1920x1080.bin |
depth_scale |
Indicate depth unit in meters per each depth value |
Float |
depth_scale: 0.0010 |
depth_datatype |
Indicate depth datatype, only [uint16] is supported for this version |
String, Values must be uint16 |
depth_datatype: uint16 |
depth_size |
Indicate depth resolutions in [width, height] |
List[Uint32], must be [width, height] |
depth_size: [640, 480] |
color |
Indicate color format. only rgba is supported |
String. Value must be rgba |
color: rgba |
color_size |
Indicate color resolutions in [width, height] |
List[Uint32], must be [width, height] |
color_size: [1920, 1080] |
depth_intrinsic |
Indicate depth sensor intrinsic parameter groups |
Intrinsic Configuration Group |
|
color_intrinsic |
Indicate color sensor intrinsic parameter groups |
Intrinsic Configuration Group |
|
depth_to_color_extrinsic |
Indicate extrinsic parameters from depth sensor to color sensor |
Extrinsic Configuration Group |
|
Configuration Body for Intrinsic Parameters :
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
width |
Specify sensor width in pixels |
Uint32 |
width: 848 |
height |
Specify sensor height in pixels |
Uint32 |
height: 480 |
centerX |
Specify coordinate axis position in pixels in horizontal direction |
Float |
centerX: 424.06 |
centerY |
Specify coordinate axis position in pixels in vertical direction |
Float |
centerY: 533.28 |
fx |
Specify focal length in pixels in X direction |
Float |
fx: 1358.21 |
fy |
Specify focal length in pixels in Y direction |
Float |
fy: 1358.25 |
Configuration Body for Extrinsic Parameters:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
rotation |
Specify an extrinsic 3x3 matrix for rotation. Values in Column-major order |
List[Float], Values in Column-major order |
rotation: [1, -0.0068, 0.0010, 0.0068, 1, 0, -0.0010, 0, 1] |
translation |
Specify an extrinsic 3x1 matrix for translation. Values in Column-major order |
List[Float], Values in Column-major order |
translation: [0.01481, -0.0001, 0.0002] |