Behavior Trees#
Behavior tree codelets are one of the mechanisms to control the flow of tasks in GXF. They follow the same general behavior as classical behavior trees, with some useful additions for robotics applications. This document gives an overview of the general concept, the available behavior tree node types, and some examples of how to use them individually or in conjunction with each other.
General Concept#
Behavior trees consist of n-ary trees of entities that can have zero or more children. The conditional execution of parent entity is based on the status of execution of the children. A behavior tree is graphically represented as a directed tree in which the nodes are classified as root, control flow nodes, or execution nodes (tasks). For each pair of connected nodes, the outgoing node is called parent and the incoming node is called child.
The execution of a behavior tree starts from the root which sends ticks
with a certain frequency to its child. When the execution of a node in
the behavior tree is allowed, it returns to the parent a
status running if its execution has not finished yet, success if it has
achieved its goal, or failure otherwise. The behavior tree also uses a
controller component for controlling the entity’s termination policy and
the execution status. One of the controller behaviors currently
implemented for Behavior Tree is
EntityCountFailureRepeatController, which repeats the entity on
failure up to repeat_count times before deactivating it.
GXF supports several behavior tree codelets which are explained in the following section.
Behavior Tree Codelets#
Each behavior tree codelet can have a set of parameters defining how it
should behave. Note that in all the examples given below, the naming convention for configuring the children parameter for root codelets is [child_codelet_name\child_codelet_scheduling_term].
Constant Behavior#
After each tick period, switches its own status to the configured desired constant status.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
constant_status |
The desired status to switch to during each tick time. |
An example diagram depicting Constant behavior used in conjunction with a Sequence behavior defined for root entity is shown below
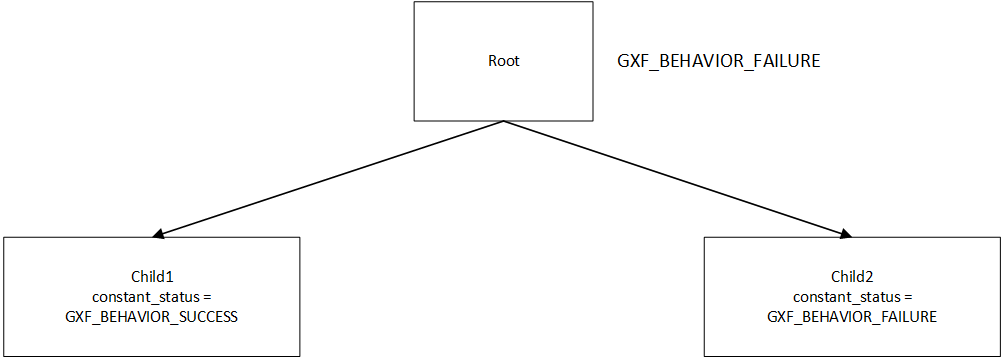
Here, the child1 is configured to return a constant status of success (GXF_BEHAVIOR_SUCCESS) and child2 returns failure (GXF_BEHAVIOR_FAILURE), resulting into the root node (configured to exhibit sequence behavior) returning GXF_BEHAVIOR_FAILURE.
The controller for each child can be configured to repeat the execution on failure. A code snippet of configuring the example described is shown below.
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_codelet
type: nvidia::gxf::SequenceBehavior
parameters:
children: [ child1/child1_st, child2/child2_st ]
s_term: root_st
---
name: child2
components:
- name: child2_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 3
return_behavior_running_if_failure_repeat: true
- name: child2_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: false
- name: child2_codelet
type: nvidia::gxf::ConstantBehavior
parameters:
s_term: child2_st
constant_status: 1
Parallel Behavior#
Runs its child nodes in parallel. By default, succeeds when all child nodes succeed, and fails when all child nodes fail. This behavior can be customized using the parameters below.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
children |
Child entities |
success_threshold |
Number of successful children required for success. A value of -1 means all children must succeed for this node to succeed. |
failure_threshold |
Number of failed children required for failure. A value of -1 means all children must fail for this node to fail. |
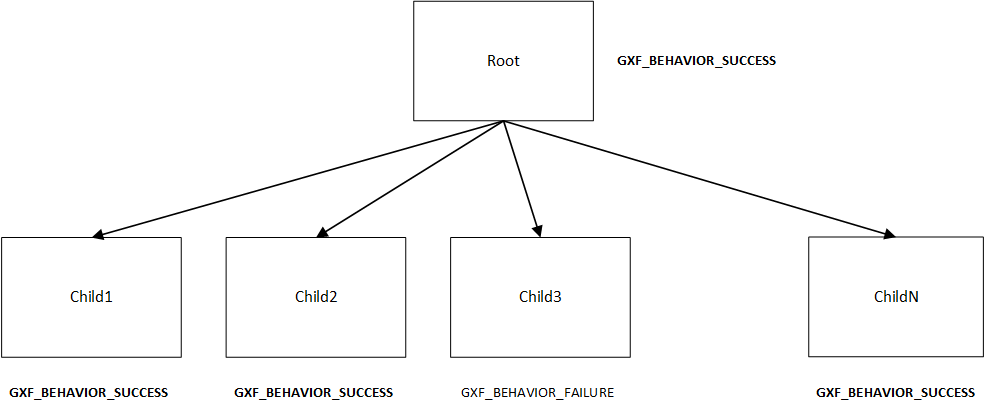
The diagram below shows a graphical representation of a parallel behavior configured with failure_threshold configured as -1. Hence, the root node returns GXF_BEHAVIOR_SUCCESS even if one child returns a failure status.
A code snippet to configure the example described is shown below.
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_codelet
type: nvidia::gxf::ParallelBehavior
parameters:
children: [ child1/child1_st, child2/child2_st ]
s_term: root_st
success_threshold: 1
failure_threshold: -1
Repeat Behavior#
Repeats its only child entity. By default, won’t repeat when the child entity fails. This can be customized using the parameters below.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
repeat_after_failure |
Denotes whether to repeat the child after it has failed. |
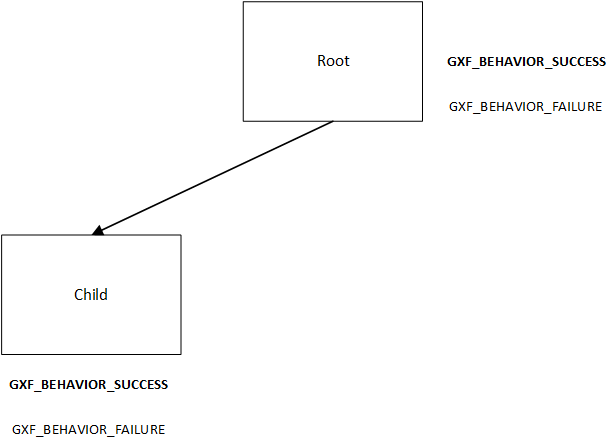
The diagram below shows a graphical representation of a repeat behavior. The root entity can be configured to repeat the only child to repeat after failure. It succeeds when the child entity succeeds.
A code snippet to configure a repeat behavior is as shown below -
name: repeat_knock
components:
- name: repeat_knock_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: repeat_knock_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: false
- name: repeat_codelet
type: nvidia::gxf::RepeatBehavior
parameters:
s_term: repeat_knock_st
children: [ knock_on_door/knock_on_door_st ]
repeat_after_failure: true
---
Selector Behavior#
Runs all child entities in sequence until one succeeds, then reports success. If all child entities fail (or no child entities are present), this codelet fails.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
children |
Child entities |
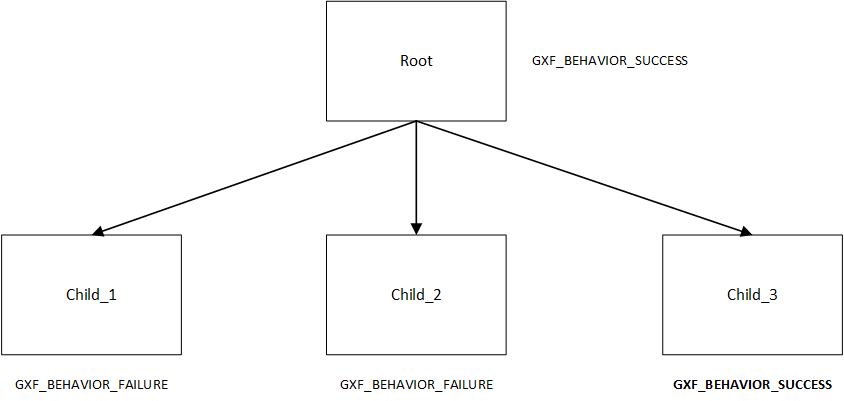
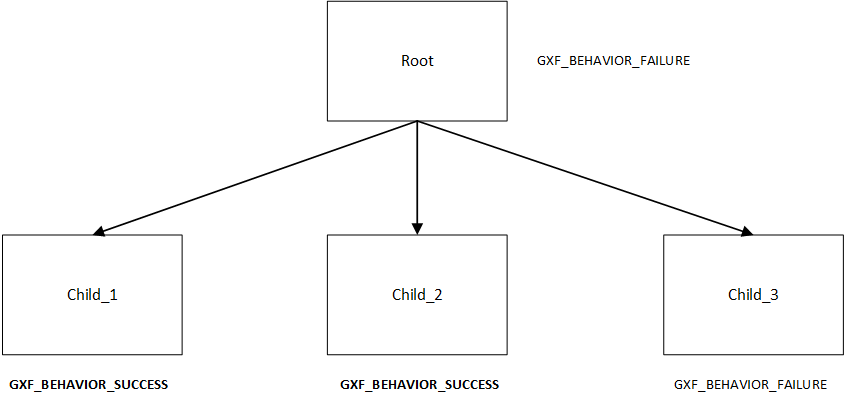
The diagram below shows a graphical representation of a Selector behavior. The root entity starts child_1, child_2 and child_3 in a sequence. Although child_1 and child_2 fail, the root entity will return success since child_3 returns successfully.
A code snippet to configure a selector behavior is as shown below -
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_sel_codelet
type: nvidia::gxf::SelectorBehavior
parameters:
children: [ door_distance/door_distance_st, door_detected/door_detected_st, knock/knock_st ]
s_term: root_st
---
name: door_distance
components:
- name: door_distance_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: door_distance_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: false
- name: door_dist
type: nvidia::gxf::SequenceBehavior
parameters:
children: []
s_term: door_distance_st
---
Sequence Behavior#
Runs its child entities in sequence, in the order in which they are defined. Succeeds when all child entities succeed or fails as soon as one child entity fails.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
children |
Child entities |
The diagram below shows a graphical representation of a Sequence behavior. The root entity starts child_1, child_2 and child_3 in a sequence. Although child_1 and child_2 pass, the root entity will return failure since child_3 returns failure.
A code snippet to configure a sequence behavior is as shown below -
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_codelet
type: nvidia::gxf::SequenceBehavior
parameters:
children: [ child1/child1_st, child2/child2_st ]
s_term: root_st
Switch Behavior#
Runs the child entity with the index defined as desired_behavior.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
children |
Child entities |
desired_behavior |
The index of child entity to switch to when this entity runs |
In the code snippet shown below, the desired behavior of the root entity is designated to be the the child at index 1. (scene). Hence, that is the entity that is run.
name: root
components:
- name: root_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: root_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: true
- name: root_switch_codelet
type: nvidia::gxf::SwitchBehavior
parameters:
children: [ scene/scene_st, ref/ref_st ]
s_term: root_st
desired_behavior: 0
---
name: scene
components:
- name: scene_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 0
- name: scene_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: false
- name: scene_seq
type: nvidia::gxf::SequenceBehavior
parameters:
children: [ pose/pose_st, det/det_st, seg/seg_st ]
s_term: scene_st
---
Timer Behavior#
Waits for a specified amount of time delay and switches to the configured result switch_status afterwards.
Parameter |
Description |
|---|---|
s_term |
scheduling term used for scheduling the entity itself |
clock |
Clock |
switch_status |
Configured result to switch to after the specified delay |
delay |
Configured delay |
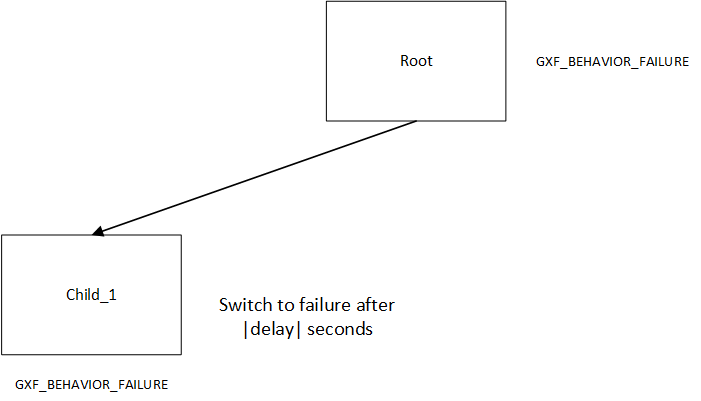
In the diagram shown below, the child entity switches to failure after a configured delay period. The root entity hence returns failure.
A code snippet for the same shown below -
name: knock_on_door
components:
- name: knock_on_door_controller
type: nvidia::gxf::EntityCountFailureRepeatController
parameters:
max_repeat_count: 10
- name: knock_on_door_st
type: nvidia::gxf::BTSchedulingTerm
parameters:
is_root: false
- name: knock
type: nvidia::gxf::TimerBehavior
parameters:
switch_status: 1
clock: sched/clock
delay: 1
s_term: knock_on_door_st
---