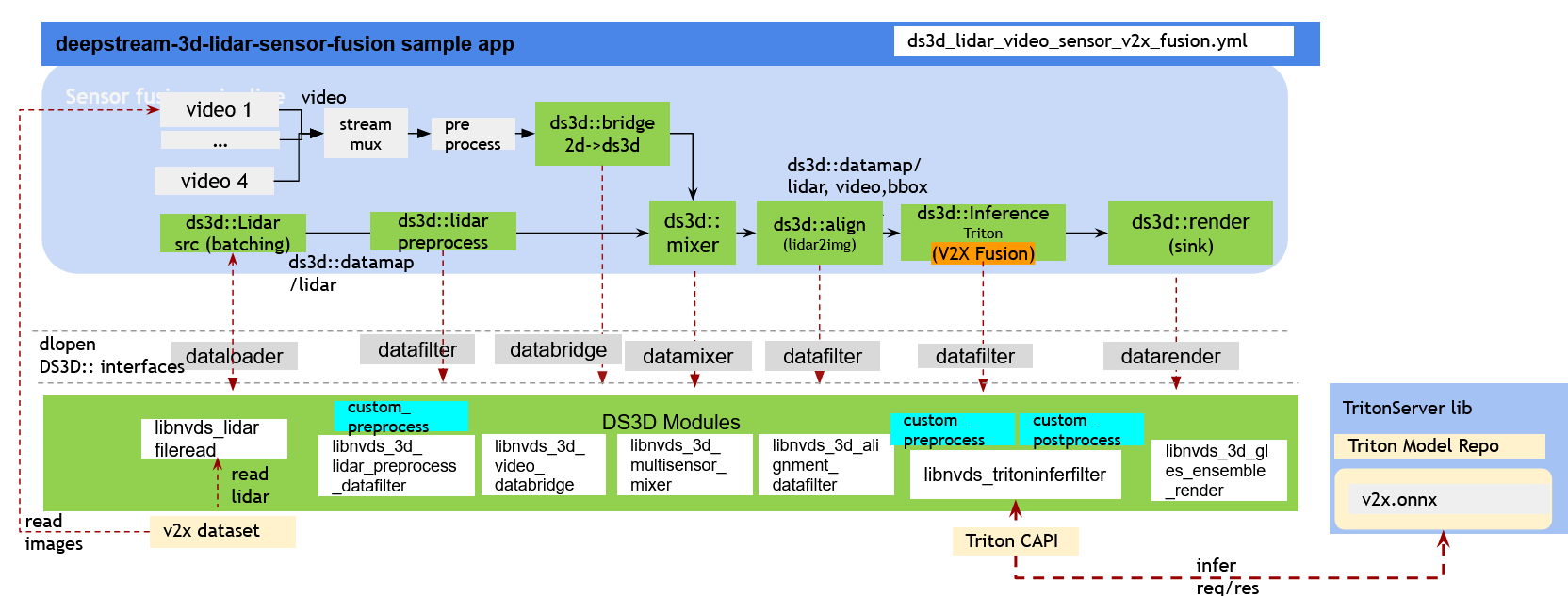
DeepStream-3D Multi-Modal V2XFusion Setup#
The pipeline efficiently processes data from 4 cameras and 4 corresponding LiDARs, inferencing the 3D bboxes with a new model which combines the BEVFusion model and the BEVHeight model together to get more accurate detection result. This model is pre-trained by the DAIR-V2X dataset . The pipeline seamlessly employs ds3d::datafilter for triton inference. Ultimately, users can inferencing 4 cameras’ videos/images and the corresponding LiDARs’ data to detect 3D bboxes of different objects in road. The results can be visualized together with videos/images and projected LiDAR point clouds in different ways by different rendering configurations.
Prerequisites#
Follow the instructions in the apps/sample_apps/deepstream-app/README file to install the prerequisites for common DeepStream SDK modules.
Follow the instructions in the samples/configs/deepstream-app-triton/README file to prepare the Triton Server environment.
The following development packages must be installed for DS3D sample apps:
GStreamer-1.0
GStreamer-1.0 Base Plugins
GLES library
libyaml-cpp-dev
Getting Started#
Start the deepstream-triton base container for V2XFusion tests. Skip this step if users have installed Triton dependencies manually on Jetson host.
# running cmdline outside of the container $ xhost + # export DOCKER_GPU_ARG="--runtime nvidia --privileged" # for Jetson Orin $ export DOCKER_GPU_ARG="--gpus all" # for x86 # start the container interactively $ docker run $DOCKER_GPU_ARG -it --rm --ipc=host --net=host -v /tmp/.X11-unix:/tmp/.X11-unix \ -e DISPLAY=$DISPLAY \ -w /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion \ nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch # {xx.xx.xx} is deepstream sdk version number
To get started, navigate to the following directory:
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
# sudo chmod -R a+rw . # Grant read/write permission if running on Jetson host
Download V2XFusion Models and Build TensorRT Engine Files#
Download the pre-trained model from the V2XFusion pre-trained model download link and put it to the folder v2xfusion/models/v2xfusion.
Download the V2X-Seq-SPD (V2X-Seq Perception Dataset) example dataset from AIR-THU/DAIR-V2X and put the downloaded V2X-Seq-SPD-Example.zip in the v2xfusion/scripts folder.
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/v2xfusion/scripts
$ ls V2X-Seq-SPD-Example.zip # verify the dataset is ready
Please ensure you have the latest python packages
$ sudo pip install --upgrade setuptools packaging $ sudo pip cache purge
Run the script to generate the model TensorRT engine file and ds3d required dataset.
$ pip install gdown python-lzf $ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/v2xfusion/scripts $ gdown 1gjOmGEBMcipvDzu2zOrO9ex_OscUZMYY $ ./prepare.sh dataset
Note: The example dataset is provided by AIR-THU/DAIR-V2X. For each dataset an user elects to use, the user is responsible for checking if the dataset license is fit for the intended purpose.
Start DS3D V2XFusion Pipeline#
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_video_sensor_v2x_fusion.yml
Build from source:#
To compile sample app deepstream-3d-lidar-sensor-fusion:
$ make
$ sudo make install
In Docker containers, sudo is not required for this install step.
NOTE: To compile the sources, run make with “sudo” or root permission.
To compile the custom preprocessing and postprocessing libraries for the sample app deepstream-3d-lidar-sensor-fusion from source:
$ cd /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/inference_custom_lib/ds3d_v2x_infer_custom_preprocess
# sudo not required in case of docker containers
$ sudo make install
$ cd /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/inference_custom_lib/ds3d_v2x_infer_custom_postprocess
# sudo not required in case of docker containers
$ sudo make install