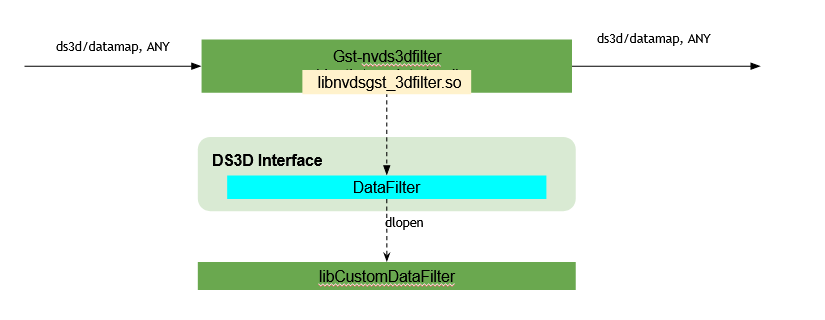
Gst-nvds3dfilter#
The Gst-nvds3dfilter plugin is a customizable plugin which provides a custom library interface to load component ds3d::datafilter.
The Plugin is fully configured through YAML format content or file. sink_caps and src_caps is also configurable.
Custom library Interfaces#
The plugin parse the config file or content and set SinkCaps and SrcCaps. load a custom ds3d::datafilter from custom_lib_path. Create this datafilter by custom_create_function.
See more details of ds3d::datafilter in DS3D Manual ds3d::datafilter- DS3D Custom DataFilter.
Inputs and Outputs#
Inputs
NvDs3DBuffer or
Metadata (NvDsBatchMeta) which has user meta NVDS_3D_DATAMAP_META_TYPE
Control parameters
config-file
config-content
Output
NvDs3DBuffer or
Metadata (NvDsBatchMeta) which has user meta NVDS_3D_DATAMAP_META_TYPE
sink_caps
parsed from filed of
in_caps: ds3d/datamapor any user specifiedin_caps:.
src_caps
parsed from filed of
out_caps: ds3d/datamapor any user specifiedout_caps:.
Configuration file#
- Example:
name: multimodal_triton_infer type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_tritoninferfilter.so custom_create_function: createLidarInferenceFilter config_body: in_streams: [color, depth]
Gst-nvds3dfilter properties Specifications#
Properties |
Description |
Release |
|---|---|---|
config-content |
yaml config content |
DS 6.1 |
config-file |
yaml config file path |
DS 6.1 |
Supported DS3D filter custom libs#
These custom libs are part of DeepStream release package.
DS3D Data filter |
Data filter custom library |
Creating Instance Function |
Description |
|---|---|---|---|
Multi-Modal-triton-infer |
|
|
Multi-modal sensor data inference library, see details in libnvds_tritoninferfilter Configuration Specifications |
Data-alignment |
|
|
lidar/camera Sensor Intrinsic and Extrinsic parameters and alignment |
Depth-2-point-cloud |
|
|
Convert Image Depth data into 3D Point Cloud data, see details in Custom datafilter libnvds_3d_depth2point_datafilter Configuration Specifications |
Custom ds3d::datafilter library: libnvds_3d_alignment_datafilter.so#
The input kLidarXYZI from ds3d/datamap buffer is converted into kLidarXYZIAligned.
This is done by a series of transformations.
Transformations done inside the alignment filter are described below with the help of KITTI Data format and calibration data references.
Transform ID |
Details |
|---|---|
AL_TR_1 |
|
AL_TR_2 |
|
AL_TR_3 |
|
In DeepStream world:
cam_intrinsic |
|
lidar_to_cam_extrisic |
is a 3X4 matrix = matrix_multiply(R0_rect, Tr_velo_to_cam) |
More info here: Alignment configuration Options.
Inputs and Outputs#
Inputs
ds3d/datamap
Control parameters
config-file
config-content
Output
ds3d/datamap
Configuration file#
- Example:
name: lidar_alignment_filter type: ds3d::datafilter link_to: ds3d_aligned_render in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_3d_alignment_datafilter.so custom_create_function: createLidarAlignmentFilter config_body: cam_width: 1242 cam_height: 375 cam_intrinsic: [7.215377000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, 1.728540000000e+02, 1.000000000000e+00, 4.485728000000e+01, 2.163791000000e-01, 2.745884000000e-03] #lidar_to_cam_extrisic is a 3X4 matrix = matrix_multiply(R0_rect, Tr_velo_to_cam); #lidar_to_cam_extrisic is in column major order #For more details on R0_rect and Tr_velo_to_cam, please check: https://github.com/lkk688/3DDepth/blob/main/README.md lidar_to_cam_extrisic: [2.34773698e-04, 1.04494074e-02, 9.99945389e-01, -9.99944155e-01, 1.05653536e-02, 1.24365378e-04, -1.05634778e-02, -9.99889574e-01, 1.04513030e-02, -2.79681694e-03, -7.51087914e-02, -2.72132796e-01] #cam input keys to ratain in the output datamap cam_input_keys: [DS3D::ColorFrame+1] #lidar input and output/aligned keys to retain in the output datamap #note: lidar_input_keys and lidar_aligned_keys map the same sensor data lidar_input_keys: [DS3D::LidarXYZI+0] lidar_aligned_keys: [DS3D::LidarAlignedXYZIKey] max_points: 2073600 mem_pool_size: 32 align_to_intrinsic: false lidar_element_size: 4
Configuration options#
config-key |
Description |
Example value |
|---|---|---|
cam_width |
The width of camera image used for video input. |
1242 |
cam_height |
The height of camera image used for video input. |
375 |
cam_intrinsic |
Is a 3X4 matrix in column major.
|
[3X4] matrix in column major. |
lidar_to_cam_extrisic |
is a 3X4 matrix = matrix_multiply(R0_rect, Tr_velo_to_cam);
|
[3X4] matrix in column major. |
lidar_input_key |
The keyname to use for lidar input from the input datamap buffer. |
DS3D::LidarXYZI+0 |
lidar_aligned_key |
The keyname to use for lidar output newly added by alignment filter into the output datamap buffer. |
DS3D::LidarAlignedXYZIKey |
max_points |
Maximum number of Lidar points in the input datamap at:
|
2048000 |
mem_pool_size |
Alignment filter maintains an internal pool.
|
4 |
align_to_intrinsic |
|
True |
lidar_element_size |
|
4 |