Accelerated GStreamer#
This topic is a guide to the GStreamer-1.0 version 1.20 based accelerated solution included in NVIDIA® Jetson™ Ubuntu 22.04.
GStreamer-1.0 Installation and Set up#
This section explains how to install and configure GStreamer.
Installing GStreamer-1.0#
Enter the commands:
$ sudo apt-get update $ sudo apt-get install gstreamer1.0-tools gstreamer1.0-alsa \ gstreamer1.0-plugins-base gstreamer1.0-plugins-good \ gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly \ gstreamer1.0-libav $ sudo apt-get install libgstreamer1.0-dev \ libgstreamer-plugins-base1.0-dev \ libgstreamer-plugins-good1.0-dev \ libgstreamer-plugins-bad1.0-dev
Checking the GStreamer-1.0 Version#
Enter the command:
$ gst-inspect-1.0 --version
Installing Accelerated GStreamer plugins#
To install the latest accelerated gstreamer plugins and applications, run the following commands:
$ sudo apt-get update $ sudo apt-get install nvidia-l4t-gstreamer $ sudo ldconfig $ rm -rf .cache/gstreamer-1.0/
GStreamer-1.0 Plugin Reference#
GStreamer-1.0 includes the following gst-v4l2 video decoders:
Video decoder |
Description |
|---|---|
nvv4l2decoder |
V4L2 H.265 Video decoder |
V4L2 H.264 Video decoder |
|
V4L2 VP8 video decoder |
|
V4L2 VP9 video decoder |
|
V4L2 MPEG4 video decoder |
|
V4L2 MPEG2 video decoder |
|
V4L2 JPEG/MJPEG video decoder |
|
V4L2 AV1 video decoder |
Note
For Jetson Thor platforms, nvv4l2decoder no longer supports JPEG/MJPEG video decoding.
GStreamer-1.0 includes the following gst-v4l2 video encoders:
Video encoder |
Description |
|---|---|
nvv4l2h264enc |
V4L2 H.264 video encoder Jetson Thor platform enhancements
|
nvv4l2h265enc |
V4L2 H.265 video encoder Jetson Thor platform enhancements
|
nvv4l2av1enc |
V4L2 AV1 video encoder |
Jetson Thor Platform CUVID Encoder Properties
The following additional properties are available on the Jetson Thor platform:
Property |
Description |
Values |
|---|---|---|
|
GPU device ID for CUDA encoding |
0–n (default: 0) |
|
CUDA encoder preset level |
0–7 (default: 1) |
|
CUDA encoder tuning information |
0–4 (default: 3) |
|
CUDA memory type for encoding |
0: Host
1: Device (default)
3: Surface array (supported
for iGPU on Jetson but
not recommended for
iGPU-only use cases to
align with dGPU behavior)
4: CUDA array
|
GStreamer-1.0 includes the following EGL™ image video sink:
Video sink |
Description |
|---|---|
nveglglessink |
EGL/GLES video sink element, support both the X11 and Wayland backends |
nv3dsink |
EGL/GLES video sink element |
GStreamer-1.0 includes the following DRM video sink:
Video sink |
Description |
|---|---|
nvdrmvideosink |
DRM video sink element |
GStreamer-1.0 includes the following proprietary NVIDIA plug-ins:
NVIDIA proprietary plug-in |
Description |
|---|---|
|
Camera plug-in for Argus API. Supports CUDA processing path via
Provides Block Linear ( |
|
Multi-sensor camera source plug-in for SIPL API (Jetson Thor platform). Supports both Camera over Ethernet (CoE)
and GMSL transport. Creates one Uses NvSciSyncFence synchronization and NvBufSurface interoperability. Provides Block Linear ( |
|
Camera plug-in for V4L2 API. |
|
Video format conversion and scaling. |
|
Video compositor. |
|
Acts as GStreamer Source Component; accepts EGLStream from EGLStream producer. |
|
Video Sink Component. Accepts YUV-I420 format and produces EGLStream (RGBA). |
|
Video transform element for NVMM to
EGLimage. (Supported only with
|
|
Deinterlace video frames using methods supported by NVIDIA platforms. Supports both VIC and GPU backends. |
GStreamer-1.0 includes the following libjpeg-based JPEG image
video encode/decode plugins:
JPEG |
Description |
|---|---|
nvjpegenc |
JPEG encoder element |
nvjpegdec |
JPEG decoder element |
Note
Run the following command before starting the video decode pipeline using gst-launch-1.0 or nvgstplayer-1.0:
$ export DISPLAY=:0
Enter this command to start X server if it is not already running:
$ xinit &
Prerequisites for JPEG Encode/Decode on Jetson Thor Platform#
Note
The library libnvjpeg.so.13 should be present in the BSP if the CUDA Toolkit 13.0 is installed.
Decode Examples#
The examples in this section show how you can perform audio and video decode with GStreamer.
Audio Decode Examples Using gst-launch-1.0#
The following examples show how you can perform audio decode using GStreamer-1.0.
AAC Decode (OSS Software Decode):
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.audio_0 ! \ queue ! avdec_aac ! audioconvert ! alsasink -e
AMR-WB Decode (OSS Software Decode):
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.audio_0 ! queue ! avdec_amrwb ! \ audioconvert ! alsasink -eAMR-NB Decode (OSS Software Decode):
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.audio_0 ! queue ! avdec_amrnb ! \ audioconvert ! alsasink -eMP3 Decode (OSS Software Decode):
$ gst-launch-1.0 filesrc location=<filename.mp3> ! mpegaudioparse ! \ avdec_mp3 ! audioconvert ! alsasink -eNote
To route audio over HDMI®, set the
alsasinkpropertydeviceto the value given for your platform in the table Port to device ID map in the topic Audio Setup and Development.For example, use
device=hw:0,7to route audio over the Jetson TX2 HDMI/DP 1 (HDMI) port.
Video Decode Examples Using gst-launch-1.0#
The following examples show how you can perform video decode on GStreamer-1.0.
Video Decode Using gst-v4l2#
The following examples show how you can perform video decode using
the gst-v4l2 plugin on GStreamer-1.0.
H.264 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder ! nv3dsink -eH.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_h265.mp4> ! \ qtdemux ! queue ! h265parse ! nvv4l2decoder ! nv3dsink -e10-bit H.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_10bit.mkv> ! \ matroskademux ! queue ! h265parse ! nvv4l2decoder ! \ nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nv3dsink -e12-bit H.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_12bit.mkv> ! \ matroskademux ! queue ! h265parse ! nvv4l2decoder ! \ nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nv3dsink -e8-bit YUV444 H.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_8bit_YUV444.265> ! \ h265parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nv3dsink -e YUV444 planar format is supported on Jetson Thor; YUV444 semi-planar format is supported on Jetson Orin.VP9 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_vp9.mkv> ! \ matroskademux ! queue ! nvv4l2decoder ! nv3dsink -eVP8 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_vp8.mkv> ! \ matroskademux ! queue ! nvv4l2decoder ! nv3dsink -eMPEG-4 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_mpeg4.mp4> ! \ qtdemux ! queue ! mpeg4videoparse ! nvv4l2decoder ! nv3dsink -eMPEG-4 Decode DivX 4/5 (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_divx.avi> ! \ avidemux ! queue ! mpeg4videoparse ! nvv4l2decoder ! nv3dsink -eMPEG-2 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_mpeg2.ts> ! \ tsdemux ! queue ! mpegvideoparse ! nvv4l2decoder ! nv3dsink -eAV1 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location = <filename_av1.webm> ! \ matroskademux ! av1parse ! queue ! nvv4l2decoder ! nv3dsink -e8-bit YUV422 H.264 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_8bit_YUV422.264> ! \ h264parse ! nvv4l2decoder ! nvvidconv ! nv3dsink -e10-bit YUV422 H.264 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_10bit_YUV422.264> ! \ h264parse ! nvv4l2decoder ! nvvidconv ! nv3dsink -e8-bit YUV422 H.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_8bit_YUV422.265> ! \ h265parse ! nvv4l2decoder ! nvvidconv ! nv3dsink -e10-bit YUV422 H.265 Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename_10bit_YUV422.265> ! \ h265parse ! nvv4l2decoder ! nvvidconv ! nv3dsink -e
Supported Decoder Features with GStreamer-1.0#
This section describes usage examples for features supported by the NVIDIA accelerated decoder.
Features Supported Using gst-v4l2#
This section describes usage examples for features supported by the NVIDIA accelerated gst-v4l2 decoder.
Note
Display detailed information on the nvv4l2decoder property with the command:
$ gst-inspect-1.0 nvv4l2decoder
Disable the Decoded Picture Buffer (DPB):
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ disable-dpb=true ! nv3dsink -eThis feature disables decoder DPB management, which allows low-latency. It only works when no B-frames are present in the stream.
Drop frame interval:
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ drop-frame-interval=5 ! nv3dsink -eThis feature sets the interval after which the decoder outputs the frames. Rest frames are dropped.
Enable the error check:
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ enable-error-check=true ! nv3dsink -eThis feature is not supported on Jetson Thor.
Enable full frame:
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ enable-full-frame=true ! nv3dsink -eWhen set to true, it indicates to the decoder that the input buffer contains one complete frame information. This feature is not supported on Jetson Thor.
Enable frame type reporting:
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ enable-frame-type-reporting=true ! nv3dsink -eThis feature is not supported on Jetson Thor.
Set skip frames:
$ gst-launch-1.0 filesrc location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ skip-frames=1 ! nv3dsink -eThe following frame types are supported for decode:
0: decode_all
1: decode_non_ref
2: decode_key
Decode MJPEG:
$ gst-launch-1.0 filesrc location=<filename>.mjpeg ! \ jpegparse ! nvv4l2decoder mjpeg=true ! nv3dsink -eDecode H.264/H.265 GDR (Gradual Decode Refresh) streams:
$ gst-launch-1.0 filesrc \ location=<filename_h264.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder \ is-gdr-stream=true ! nv3dsink -eThis feature is not supported on Jetson Thor.
Decode H.264 interlaced streams:
$ gst-launch-1.0 filesrc \ location=<filename_h264_interlace.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! nv3dsink -e
Image Decode Examples Using gst-launch-1.0#
The following example shows how you can perform JPEG decode on GStreamer-1.0.
JPEG Decode (NVIDIA Accelerated Decode):
$ gst-launch-1.0 filesrc location=<filename.jpg> ! nvjpegdec ! \ imagefreeze ! xvimagesink -e On Jetson, ``nvjpegdec`` supports the ``I420``, ``GRAY8``, ``YUY2``, ``YUV444``, ``NV12``, ``Y42B``, ``RGB``, and ``RGBA`` input formats.JPEG Decode with multifilesrc (NVIDIA Accelerated Decode):
$ gst-launch-1.0 multifilesrc location=<image>%d.jpg ! nvjpegdec ! \ 'video/x-raw(memory:NVMM), format=I420' ! nvvidconv ! \ 'video/x-raw, format=I420' ! multifilesink location=<raw>%d.yuv -e
Set decoder output memory type to CUDA pinned memory:
$ gst-launch-1.0 filesrc location=<filename.jpg> ! nvjpegdec out-mem-type=memtype_pinned ! \ 'video/x-raw(memory:NVMM), format=I420' ! fakesink -e
Note
For the Jetson Thor platform, ensure that the prerequisites are installed.
Encode Examples#
The examples in this section show how you can perform audio and video encode with GStreamer-1.0.
Audio Encode Examples Using gst-launch-1.0#
The following examples show how you can perform audio encode on GStreamer-1.0.
AAC Encode (OSS Software Encode):
$ gst-launch-1.0 audiotestsrc ! \ 'audio/x-raw, format=(string)S16LE, layout=(string)interleaved, rate=(int)44100, channels=(int)2' ! \ voaacenc ! qtmux ! filesink location=test.mp4 -eAMR-WB Encode (OSS Software Encode):
$ gst-launch-1.0 audiotestsrc ! \ 'audio/x-raw, format=(string)S16LE, layout=(string)interleaved, \ rate=(int)16000, channels=(int)1' ! voamrwbenc ! qtmux ! \ filesink location=test.mp4 -e
Video Encode Examples Using gst-launch-1.0#
The following examples show how you can perform video encode with GStreamer-1.0.
Video Encode Using gst-v4l2#
The following examples show how you can perform video encode using
gst-v4l2 plugin with GStreamer-1.0.
H.264 Encode (NVIDIA Accelerated Encode):
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvv4l2h264enc ! \ bitrate=8000000 ! h264parse ! qtmux ! filesink \ location=<filename_h264.mp4> -e $ gst-launch-1.0 filesrc location=<i420_1080p.yuv>! \ videoparse width=1920 height=1080 format=52 framerate=30 ! \ 'video/x-raw, format=(string)I420' ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc ! \ h264parse ! filesink location=<filename_i420_1080p.264> -e8-bit NV24 H.264 Encode (NVIDIA Accelerated Encode; Jetson Orin only):
$ gst-launch-1.0 filesrc location=<filename_nv24_352_288.yuv>! \ videoparse width=352 height=288 format=52 framerate=30 ! \ 'video/x-raw, format=(string)NV24' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV24' ! nvv4l2h264enc \ profile=High444 ! h264parse ! filesink \ location=<filename_8bit_nv24.264> -e
8-bit YUV444 H.264 Encode (NVIDIA Accelerated Encode; Jetson Thor only):
$ gst-launch-1.0 filesrc location=bus_cif_444.yuv ! \ videoparse width=352 height=288 format="y444" ! \ 'video/x-raw' ! nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM)' ! nvv4l2h264enc output-io-mode=5 profile=High444 ! \ h264parse ! filesink location=test_yuv444.264
Note
8-bit YUV444 H.264 encode is supported with High444 profile.
H.265 Encode (NVIDIA Accelerated Encode):
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvv4l2h265enc \ bitrate=8000000 ! h265parse ! qtmux ! filesink \ location=<filename_h265.mp4> -eNote
Jetson AGX Orin and Jetson Thor support 8Kp30 H.265 encode.
For example:
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)3840, \ height=(int)2160, format=(string)NV12, \ framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), width=(int)7860, \ height=(int)4320, format=(string)NV12' ! nvv4l2h265enc \ preset-level=1 control-rate=1 bitrate=40000000 ! \ h265parse ! matroskamux ! \ filesink location=<filename_8k_h265.mkv> -e
10-bit H.265 Encode (NVIDIA Accelerated Encode):
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)P010_10LE' ! \ nvv4l2h265enc bitrate=8000000 ! h265parse ! qtmux ! \ filesink location=<filename_10bit_h265.mp4> -e8-bit NV24 H.265 Encode (NVIDIA Accelerated Encode; Jetson Orin only):
$ gst-launch-1.0 filesrc location=<filename_nv24_352_288.yuv> ! \ videoparse width=352 height=288 format=52 framerate=30 ! \ 'video/x-raw, format=(string)NV24' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV24' ! nvv4l2h265enc \ profile=Main ! h265parse ! filesink location=<filename_8bit_nv24.265> -e
8-bit YUV444 H.265 Encode (NVIDIA Accelerated Encode; Jetson Thor only):
$ gst-launch-1.0 filesrc location=bus_cif_444.yuv ! \ videoparse width=352 height=288 format="y444" ! \ 'video/x-raw' ! nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM)' ! nvv4l2h265enc profile=Main ! \ h265parse ! filesink location=test_yuv444.265
Note
8-bit YUV444 H.265 encode is supported with Main profile.
10-bit YUV444 H.265 Encode (NVIDIA Accelerated Encode; Jetson Thor only):
$ gst-launch-1.0 filesrc location=sample_yuv44410.mp4 ! \ qtdemux ! h265parse ! nvv4l2decoder ! nvv4l2h265enc output-io-mode=5 ! \ h265parse ! filesink location=test_yuv44410_sample.265
AV1 Encode (NVIDIA Accelerated Encode; Jetson Orin only):
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvv4l2av1enc \ bitrate=20000000 ! webmmux ! filesink \ location=<filename_av1.webm> -eAV1 Encode with IVF Headers (NVIDIA Accelerated Encode; Jetson Orin only):
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvv4l2av1enc \ enable-headers=1 bitrate=8000000 ! filesink \ location=<filename_av1.av1> -e
Note
The frame rate limits vary between video encoders: H.264 supports 1 to 240 FPS, H.265 supports 1 to 60 FPS, AV1 supports 1 to 120 FPS.
Image Encode Examples Using gst-launch-1.0#
The following example shows how you can perform JPEG encode on GStreamer-1.0.
Image Encode:
$ gst-launch-1.0 videotestsrc num-buffers=1 ! \ 'video/x-raw, width=(int)640, height=(int)480, \ format=(string)I420' ! nvjpegenc ! filesink location=test.jpg -eNV12 Pitch-linear Image Encode:
$ gst-launch-1.0 videotestsrc num-buffers=1 ! \ 'video/x-raw, width=(int)640, height=(int)480, \ format=(string)NV12' ! nvvidconv bl-output=false ! \ 'video/x-raw(memory:NVMM)' ! nvjpegenc ! filesink location=test.jpg -eNV12 Block-linear Image Encode:
$ gst-launch-1.0 videotestsrc num-buffers=1 ! \ 'video/x-raw, width=(int)640, height=(int)480, \ format=(string)NV12' ! nvvidconv bl-output=true ! \ 'video/x-raw(memory:NVMM)' ! nvjpegenc ! filesink location=test.jpg -eMulti-file Encode:
$ gst-launch-1.0 videotestsrc num-buffers=100 ! \ 'video/x-raw, width=(int)640, height=(int)480, \ format=(string)NV12' ! nvvidconv ! \ 'video/x-raw(memory:NVMM)' ! nvjpegenc ! \ multifilesink location=<test>%d.jpeg -eSet the encoder input memory type to CUDA pinned memory:
$ gst-launch-1.0 videotestsrc num-buffers=1 ! \ 'video/x-raw, width=(int)1920, height=(int)1080, \ format=(string)I420' ! nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-pinned ! \ 'video/x-raw(memory:NVMM)' ! nvjpegenc in-mem-type=memtype_pinned ! \ filesink location=test.jpg -e
Note
For the Jetson Thor platform, ensure that the prerequisites are installed.
Supported H.264/H.265/AV1 Encoder Features with GStreamer-1.0#
This section describes example gst-launch-1.0 usage for features supported by the NVIDIA accelerated H.264/H.265/AV1 encoders.
Features Supported Using gst-v4l2#
This section describes the gst-launch-1.0 usage for features supported by the NVIDIA accelerated H.264/H.265/AV1 gst-v4l2 encoders.
The following command displays detailed information about the nvv4l2h264enc, nvv4l2h265enc, or nvv4l2av1enc encoder properties:
$ gst-inspect-1.0 [nvv4l2h264enc | nvv4l2h265enc | nvv4l2av1enc]
Set the I-frame interval (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ iframeinterval=100 ! h264parse ! qtmux ! filesink \ location=<filename_h264.mp4> -eThis property sets the encoding Intra Frame GOP occurrence frequency.
Set the IDR-frame interval (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ idrinterval=60 ! h264parse ! qtmux ! filesink \ location=<filename_h264.mp4> -eThis property sets the encoding Intra Frame IDR occurrence frequency.
Enable Rate Control (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ ratecontrol-enable=0 quant-i-frames=30 quant-p-frames=30 \ quant-b-frames=30 ! filesink location=<filename_h264.264> -eThe supported modes are 0 (constant QP mode) and 1 (variable QP mode). The default mode is 1.
Set the rate control mode and bitrate (supported with H.264/H.265/AV1 encode).
Variable bitrate (VBR) mode:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ control-rate=0 bitrate=30000000 ! h264parse ! qtmux ! filesink \ location=<filename_h264_VBR.mp4> -eNote
The AV1 codec does not currently support VBR mode.
Constant bitrate (CBR) mode:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ control-rate=1 bitrate=30000000 ! h264parse ! qtmux ! filesink \ location=<filename_h264_CBR.mp4> -e
The supported modes are 0 (VBR) and 1 (CBR).
Set the peak bitrate (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ bitrate=6000000 peak-bitrate=6500000 ! h264parse ! qtmux ! \ filesink location=<filename_h264.mp4> -ePeak bitrate takes effect only in variable bit rate mode (
control-rate=0). By default, the value is configured as (1.2×bitrate).Set the quantization parameter for I, P, and B frames (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ ratecontrol-enable=0 quant-i-frames=30 quant-p-frames=30 \ quant-b-frames=30 num-B-Frames=1 ! filesink \ location=<filename_h264.264> -eThe range of B frames does not take effect if the number of B frames is 0.
Set the quantization range for the I, P, and B frames (supported with H.264/H.265 encode) by using the following format:
"<I_range>:<P_range>:<B_range>"
<I_range>,<P_range>, and<B_range>are each expressed in the form<min>,<max>, as in this example:$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ qp-range="24,24:28,28:30,30" num-B-Frames=1 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! filesink \ location=<filename_h264.264> -eSet the hardware preset level (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ preset-level=4 MeasureEncoderLatency=1 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! \ filesink location=<filename_h264.264> -eThe following modes are supported:
0: DisablePreset.
1: UltraFastPreset.
2: FastPreset: Only integer pixel (
integer-pel) block motion is estimated. For I/P macroblock mode decisions, only Intra 16×16 cost is compared with intermode costs. Supports Intra 16×16 and Intra 4×4 modes.4: SlowPreset: Supports up to quarter pixel (
Qpel) block motion estimation. For I/P macroblock mode decisions, Intra 4×4 as well as Intra 16×16 cost is compared with intermode costs. Supports Intra 16×16 and Intra 4×4 modes.
Note
The AV1 codec currently supports only UltraFastPreset and FastPreset.
Set the profile (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ profile=0 ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eThe following profiles are supported for H.264 encode:
0: Baseline profile
1: Constrained-Baseline
2: Main profile
4: High profile
7: High444 profile
17: Constrained-High (Jetson Orin platform only)
The following profiles are supported for H.265 encode:
0: Main profile
1: Main10 profile
Note
H.264 and H.265 codecs support setting of level and tier through caps negotiation.
Insert SPS and PPS at IDR (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ insert-sps-pps=1 ! \ 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eIf enabled, a sequence parameter set (SPS) and a picture parameter set (PPS) are inserted before each IDR frame in the H.264/H.265 stream.
Note
In the AV1 codec, the property is called
insert-seq-hdr. The sequential header is inserted before each IDR frame.Enable the two-pass CBR (supported with H.264/H.265 encode; Jetson Orin only):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ control-rate=1 bitrate=10000000 EnableTwopassCBR=1 ! \ 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eTwo-pass CBR must be enabled along with constant bit rate (
control-rate=1).Slice header spacing on Jetson Orin platform (supported with H.264/H.265 encode).
Spacing in terms of macroblocks:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ slice-header-spacing=8 bit-packetization=0 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! \ filesink location=<filename_h264.264> -eThe
bit-packetization=0parameter configures the network abstraction layer (NAL) packet as macroblock (MB)-based, andslice-header-spacing=8configures each NAL packet as 8 macroblocks maximum.Spacing in terms of number of bits:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ slice-header-spacing=1400 bit-packetization=1 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! \ filesink location=<filename_h264.264> -eThe parameter
bit-packetization=1configures the network abstraction layer (NAL) packet as size-based, andslice-header-spacing=1400configures each NAL packet as 1400 bytes maximum.
Slice header spacing on Jetson Thor platform (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=100 ! \ "video/x-raw, width=1280, height=720" ! nvvidconv ! \ "video/x-raw(memory:NVMM), format=I420" ! \ nvv4l2h264enc slice-header-spacing=1400 slice-mode=1 ! \ h264parse ! filesink location=<filename_h264.264> -e $ gst-launch-1.0 videotestsrc num-buffers=300 ! \ "video/x-raw, width=1280, height=720" ! nvvidconv ! \ "video/x-raw(memory:NVMM), format=I420" ! \ nvv4l2h264enc slice-header-spacing=1400 slice-mode=1 enable-slice=1 ! \ h264parse ! filesink location=<filename_h264.264> -e $ gst-launch-1.0 videotestsrc num-buffers=300 ! \ "video/x-raw, width=1920, height=1080" ! nvvidconv ! \ "video/x-raw(memory:NVMM), format=I420" ! \ nvv4l2h265enc slice-header-spacing=4 slice-mode=3 enable-slice=1 profile=Main ! \ h265parse ! filesink location=<filename_h265.265> -e
The following slice modes are supported:
1: MB based slices
2: MB row based slices
3: Number of slices in frame
The default slice mode is 1 (MB based slices). Slice level output is enabled by setting
enable-slice=1.Enable CABAC-entropy-coding (supported with H.264 encode for main or high profile):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ profile=2 cabac-entropy-coding=1 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! \ filesink location=<filename_h264.264> -eThe following entropy coding types are supported:
0: CAVLC
1: CABAC
Set the maximum number of reference frames for the encoder (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ num-Ref-Frames=2 ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eEnable the copy timestamp (supported with H.264/H.265/AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ copy-timestamp=true ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eIf enabled, it copies the timestamp from input buffer to the output bit-stream. Mostly useful in live/transcoding use cases.
Set the number of B frames between two reference frames (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ num-B-Frames=1 ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -e
This property sets the number of B frames between two P frames.
Set the slice intra-refresh period (supported with H.264/H.265 encode).
For Jetson Orin platform:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nvv4l2h264enc \ slice-header-spacing=40 bit-packetization=0 SliceIntraRefreshInterval=60 ! \ h264parse ! filesink location=<filename_h264.264> -e
For Jetson Thor platform:
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=I420' ! nvv4l2h264enc intra-refresh="1,11,4" ! \ h264parse ! filesink location=<filename_h264.264> -e $ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=I420' ! nvv4l2h265enc intra-refresh="1,11,4" ! \ h265parse ! filesink location=<filename_h265.265> -e
The format is
"<enableIntraRefresh>,<intraRefreshPeriod>,<intraRefreshCnt>". Here<enableIntraRefresh>is 1 or 0,<intraRefreshPeriod>specifies the interval between successive intra refreshes, and<intraRefreshCnt>specifies the length of an intra refresh in number of frames for periodic intra refreshes. This value should be smaller than<intraRefreshPeriod>Enable the motion vector metadata (supported with H.264/H.265 encode; Jetson Orin only):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ EnableMVBufferMeta=1 ! 'video/x-h264, \ stream-format=(string)byte-stream, alignment=(string)au' ! \ filesink location=<filename_h264.264> -eSet the virtual buffer size (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ vbv-size=10 ! h264parse ! qtmux ! \ filesink location=<filename_h264.mp4> -eIf the buffer size of the decoder or network bandwidth is limited, configuring virtual buffer size can cause the video stream generation to correspond to the limitations based on the following formula:
virtual buffer size = vbv-size × (bitrate/fps)
Insert AUD (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ insert-aud=1 ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eThis property inserts an H.264/H.265 Access Unit Delimiter (AUD).
Insert VUI (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)I420, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc \ insert-vui=1 ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! filesink location=<filename_h264.264> -eThis property inserts H.264/H.265 video usability information (VUI) in SPS.
Enable loss-less YUV444 encoding (supported with H.264/H.265 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=(int)1280, height=(int)720, \ format=(string)NV24, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)NV24' ! nvv4l2h264enc \ profile=High444 enable-lossless=true ! h264parse ! \ filesink location=<filename_h264.264> -eSet the picture order count (POC) type (supported with H.264 encode; Jetson Orin only):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2h264enc \ poc-type=2 ! h264parse ! filesink location=<filename_h264.264> -eThe following values are supported for the poc-type property:
0: POC explicitly specified in each slice header (the default)
2: Decoding/coding order and display order are the same
Set the Disable CDF Update (supported with AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=300 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2av1enc \ disable-cdf=0 enable-headers=1 ! filesink location=<filename_av1.av1> -eSet the Tile Configuration (supported with AV1 encode).
For 1x2 Tile configuration:
$ gst-launch-1.0 videotestsrc num-buffers=30 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2av1enc \ tiles="1,0" bitrate=20000000 ! qtmux ! \ filesink location= <filename_av1.mp4> -e
For 2x1 Tile configuration:
$ gst-launch-1.0 videotestsrc num-buffers=30 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2av1enc \ tiles="0,1" bitrate=20000000 ! qtmux ! \ filesink location= <filename_av1.mp4> -e
For 2x2 Tile configuration:
$ gst-launch-1.0 videotestsrc num-buffers=30 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2av1enc \ preset-level=1 tiles="1,1" bitrate=20000000 ! qtmux ! \ filesink location= <filename_av1.mp4> -e
The feature encodes frames as super-macroblocks, with Log2(Rows) and Log2(Columns) as the input.
Set the SSIM RDO (supported with AV1 encode):
$ gst-launch-1.0 videotestsrc num-buffers=30 ! \ 'video/x-raw, width=1920, height=1080, format=I420' ! nvvidconv ! \ nvv4l2av1enc \ enable-srdo=1 ! qtmux ! \ filesink location= <filename_av1.mp4> -eEncode using CUDA array memory (Block linear format) in MMAP mode:
$ gst-launch-1.0 videotestsrc is-live=1 num-buffers=300 ! \ 'video/x-raw, framerate=30/1, width=1280, height=720, format=NV12' ! \ nvvidconv bl-output=true ! nvv4l2h264enc output-io-mode=2 cudaenc-memtype=memtype_cuda_array ! \ 'video/x-h264, profile=baseline' ! h264parse ! filesink location=<filename_h264.264> -eEncode using CUDA array memory (Block linear format) in DMABUF mode:
$ gst-launch-1.0 videotestsrc is-live=1 num-buffers=300 ! \ 'video/x-raw, framerate=30/1, width=1280, height=720, format=NV12' ! \ nvvidconv bl-output=true ! nvv4l2h264enc ! \ 'video/x-h264, profile=baseline' ! h264parse ! filesink location=<filename_h264.264> -e
Camera Captures with GStreamer-1.0#
To display nvgstcapture-1.0 usage information, enter the command:
$ nvgstcapture-1.0 --help
Note
The nvgstcapture-1.0 application default only supports Argus API using the nvarguscamerasrc plugin.
For more information, see nvgstcapture-1.0 Reference.
Camera Capture Using nvsiplsrc (CoE and GMSL)#
NVIDIA® Jetson™ offers two major camera software paths: SIPL (nvsiplsrc, for
Jetson Thor only) and Argus (nvarguscamerasrc, for Jetson Orin and Jetson Thor). For the full
platform support matrix, SIPL framework architecture, UDDF driver development, and JSON
configuration details, refer to the Camera Development section.
The nvsiplsrc plug-in is a multi-sensor camera source element for the Jetson Thor
platform. It uses the SIPL (Safe Image Processing Library) API and supports both
Camera over Ethernet (CoE) and GMSL camera transports. The plug-in automatically
discovers connected sensors and creates one src_N pad per sensor, enabling
multi-camera pipelines from a single element instance.
Key Features#
Multi-sensor, multi-pad architecture: Automatically discovers all sensors across configured modules and creates a dedicated
src_0,src_1, … pad for each. Each pad has its own NVMM buffer pool, buffer queue, and push thread.Unified CoE and GMSL support: A single code path handles both CoE and GMSL transports. Transport type is determined by the platform configuration and JSON file.
SIPL API integration: Uses the NVIDIA SIPL camera framework for sensor discovery, pipeline management, ICP/ISP buffer setup, and auto-exposure/auto-white-balance control.
NvBufSurface interoperability: NvSciBuf buffers from SIPL are converted to NvBufSurface via VIC hardware transform for seamless downstream processing.
NvSciSyncFence synchronization: ISP output fences are waited on before frame delivery to guarantee processing completion.
JSON and database configuration: Sensors can be configured through JSON files (CoE or GMSL) or through the built-in SIPL sensor database (UDDF drivers).
Live source behavior: Returns
NO_PREROLLduring state transitions, suitable for real-time streaming pipelines.
Supported Camera Configurations#
Transport |
Description |
|---|---|
Camera over Ethernet (CoE) |
Network-based camera transport using Holoscan Sensor Bridge (HSB). Requires a JSON file with MAC/IP address, HSB ID, and transport settings. Supports single and dual sensors. |
GMSL |
Direct GMSL deserializer link. Requires |
Property Reference#
Property |
Description |
Values |
|---|---|---|
|
Platform configuration name passed to |
String (such as |
|
Path to JSON configuration file. Required for CoE cameras. For GMSL, it is optional if the sensor database already contains the configuration. |
String path. Optional if the database contains the configuration. |
|
GMSL link-enable mask in hexadecimal. Selects which deserializer links are active. Required for GMSL configs. Ignored for CoE. Multiple transports can be specified with space or comma separation. |
Hex string (such as |
|
Enable Block Linear output format. Set to |
Boolean. Default: |
|
Number of NVMM buffers to allocate per pad. |
4–32. Default: 16. |
|
Number of buffers to push per pad before sending EOS. Use for fixed-length capture. |
-1 (unlimited) to MAX_INT. Default: -1. |
Pipeline Examples#
CoE Camera — Single Sensor
Capture and display (with explicit caps):
$ gst-launch-1.0 nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json \ bl-output=true ! \ 'video/x-raw(memory:NVMM), width=(int)2560, height=(int)1984, \ format=(string)NV12, framerate=(fraction)30/1' ! queue ! \ nv3dsink -eCapture and display (auto-negotiated caps):
$ gst-launch-1.0 nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json ! \ queue ! nv3dsink -eCapture and display with configurable buffer count:
$ gst-launch-1.0 nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json \ num-surfaces=10 ! \ 'video/x-raw(memory:NVMM), width=(int)2560, height=(int)1984, \ format=(string)NV12, framerate=(fraction)30/1' ! queue ! \ nv3dsink -eCapture 100 frames to
fakesink:$ gst-launch-1.0 nvsiplsrc num-buffers=100 \ json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json ! fakesinkH.264 encode to file:
$ gst-launch-1.0 -e nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvv4l2h264enc ! h264parse ! qtmux ! filesink location=output.mp4H.265 encode to file:
$ gst-launch-1.0 -e nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvv4l2h265enc ! h265parse ! qtmux ! filesink location=output.mp4Capture and display via format conversion (X11):
$ gst-launch-1.0 nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json ! \ queue ! nvvidconv ! "video/x-raw" ! xvimagesink -e
CoE Camera — Dual Sensor (Multi-Pad)
When a JSON file defines two sensors, nvsiplsrc automatically creates src_0 and
src_1 pads. Use the name property to reference each pad in the pipeline.
Dual-sensor H.264 encode to separate files:
$ gst-launch-1.0 nvsiplsrc num-buffers=100 \ json-file=/var/nvidia/nvcam/settings/sipl/vb1940_0.json name=cam \ cam.src_0 ! nvv4l2h264enc ! h264parse ! filesink location=test_0_coe.264 \ cam.src_1 ! nvv4l2h264enc ! h264parse ! filesink location=test_1_coe.264Dual-sensor display:
$ gst-launch-1.0 nvsiplsrc \ json-file=/var/nvidia/nvcam/settings/sipl/vb1940_0.json name=cam \ cam.src_0 ! queue ! nv3dsink \ cam.src_1 ! queue ! nv3dsink
GMSL Camera — Single or Multi-Sensor
For GMSL cameras, use config-name to select the platform configuration and
link-mask to select the active deserializer links. No JSON file is required
when the SIPL sensor database contains the configuration.
Single GMSL sensor to
fakesink:$ gst-launch-1.0 nvsiplsrc config-name=NOVA0 link-mask=0001 ! fakesink
Fixed-length capture (30 frames per pad):
$ gst-launch-1.0 nvsiplsrc config-name=NOVA0 link-mask=0001 num-buffers=30 \ name=cam \ cam.src_0 ! queue ! fakesink sync=false \ cam.src_1 ! queue ! fakesink sync=falseGMSL stereo display (Hawk module with 2 sensors):
$ gst-launch-1.0 nvsiplsrc config-name=NOVA0 link-mask=0001 name=cam \ cam.src_0 ! identity silent=false ! queue ! nv3dsink \ cam.src_1 ! identity silent=false ! queue ! nv3dsink -vGMSL capture to YUV file (with format conversion):
$ timeout 3 gst-launch-1.0 nvsiplsrc config-name=NOVA0 link-mask=0001 name=cam \ cam.src_0 ! identity silent=false ! queue ! nvvidconv ! \ "video/x-raw, format=I420" ! filesink location=sensor_0.yuv \ cam.src_1 ! identity silent=false ! queue ! nvvidconv ! \ "video/x-raw, format=I420" ! filesink location=sensor_1.yuv
Pitch Linear Output
Set bl-output=false to produce Pitch Linear buffers for CPU-side processing
such as JPEG encoding or OpenCV pipelines:
$ gst-launch-1.0 nvsiplsrc json-file=/var/nvidia/nvcam/settings/sipl/vb1940_1.json \
bl-output=false ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nvjpegenc ! filesink location=snapshot.jpg
Configuration Notes#
CoE-Specific
MAC addresses and IP addresses in JSON files must match your camera hardware setup.
Ensure network connectivity to the CoE camera before launching the pipeline.
Default JSON configuration files (
vb1940_*.json) are provided in/var/nvidia/nvcam/settings/sipl/.Use dedicated network interfaces for high-bandwidth camera applications.
GMSL-Specific
The
link-maskproperty is required for GMSL configurations. It specifies in hexadecimal which deserializer links are enabled. (For example,0001enables link 0 and0003enables links 0 and 1.)For multiple GMSL transports, provide space-separated or comma-separated masks (for example,
link-mask="0001 0001").Sensor authentication is automatically disabled when a link mask is provided.
General
The plug-in uses Unified Device Description Format (UDDF) drivers loaded from
/usr/lib/nvsipl_drv/during sensor discovery.NITO calibration files are loaded from
/var/nvidia/nvcam/settings/sipl/(or the path specified by theNITO_PATHenvironment variable) for auto-exposure and auto-white-balance control.Resolution and frame rate are auto-detected from the sensor configuration and negotiated automatically per pad. Manual caps filters are optional.
JSON Configuration Elements (CoE)
JSON Section |
Description |
|---|---|
|
Array of camera configuration objects with CoE-specific settings (name, type, MAC/IP address, HSB ID). |
|
Network transport configuration (interface name, IP address, VLAN settings, HSB ID). |
|
Sensor-specific information, including resolution and frame rate. |
Frame Processing Architecture#
The nvsiplsrc plug-in uses a multi-stage pipeline per sensor:
Sensor discovery:
ParseDatabase()loads UDDF drivers,ParseJsonFile()parses JSON configuration (if provided),GetSensorSystemConfig()selects the platform config, andApplyMask()filters GMSL links.Pad creation: One
src_Npad is created per discovered sensor with auto-detected resolution and frame rate.SIPL initialization:
SetPlatformCfg()andSetPipelineCfg()configure all sensors. ICP and ISP buffers are allocated and registered with the SIPL framework. NvSciSync objects are set up for fence-based synchronization.Capture: Per-sensor ISP0 threads read completed frames from SIPL completion queues, wait on NvSciSyncFence for ISP completion, and invoke a per-sensor callback.
VIC transform: Each callback acquires an NVMM buffer from the pad’s pool and performs a hardware VIC copy from the SIPL NvSciBuf buffer to the NVMM NvBufSurface.
Pad push: A per-pad push thread pops buffers from the queue, timestamps them using the element clock, and calls
gst_pad_push()to deliver downstream.
Performance Considerations#
Buffer count tuning: Increase
num-surfacesif downstream processing is slow to avoid frame drops. Decrease it to reduce memory usage and latency.Network bandwidth (CoE): Ensure sufficient Ethernet bandwidth for the configured resolution and frame rate. Use jumbo frames where possible.
GMSL link configuration: Enable only the links you need via
link-maskto minimize resource usage.Block Linear vs. Pitch Linear: Use
bl-output=true(default) for hardware-accelerated encoding and display. Usebl-output=falseonly when CPU access to pixel data is required.
CSI Camera Capture Using nvarguscamerasrc#
Use the following command to capture by using
nvarguscamerasrcand preview display withnvdrmvideosink:$ gst-launch-1.0 nvarguscamerasrc ! "video/x-raw(memory:NVMM), \ width=(int)1920, height=(int)1080, format=(string)NV12, \ framerate=(fraction)30/1" ! queue ! nvdrmvideosink -eSet the processing deadline of the sink:
$ gst-launch-1.0 nvarguscamerasrc ! "video/x-raw(memory:NVMM), \ width=(int)3840, height=(int)2160, format=(string)NV12, \ framerate=(fraction)60/1" ! nv3dsink processing-deadline=0
Note
As per the GStreamer version 1.16 release notes, GstBaseSink gained a processing-deadline property and a setter/getter API to configure a processing deadline for live pipelines. For capture use cases, add the queue element or set the processing-deadline property to 0.
Progressive Capture Using nvv4l2camerasrc#
To capture and preview display with nv3dsink, enter the command:
$ gst-launch-1.0 nvv4l2camerasrc device=/dev/video3 ! \
'video/x-raw(memory:NVMM), format=(string)UYVY, \
width=(int)1920, height=(int)1080, \
interlace-mode= progressive, \
framerate=(fraction)30/1' ! nvvidconv ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nv3dsink -e
Note
The nvv4l2camerasrc plugin default currently supports only DMABUF (importer role) streaming I/O mode with V4L2_MEMORY_DMABUF.
The nvv4l2camerasrc plugin is currently verified using the NVIDIA V4L2 driver with a sensor that supports YUV capture in UYVY format.
If you need to use a different type of sensor for capture in other YUV formats, see the topic
Sensor Software Driver Programming.
In that case nvv4l2camerasrc must also be enhanced for required YUV format support.
The nvgstcapture-1.0 application uses the v4l2src plugin to capture still images and video.
The following table shows USB camera support.
USB camera support |
Feature |
|---|---|
YUV |
Preview display |
Image capture (VGA, 640×480) |
|
Video capture (480p, 720p, H.264/H.265 encode) |
Raw-YUV Capture Using v4l2src#
Use the following command to capture raw YUV (I420 format) using v4l2src and preview display with xvimagesink:
$ gst-launch-1.0 v4l2src device="/dev/video0" ! \
"video/x-raw, width=640, height=480, format=(string)YUY2" ! \
xvimagesink -e
Camera Capture and Encode Support with OpenCV#
The OpenCV sample application opencv_nvgstcam simulates the camera
capture pipeline. Similarly, the OpenCV sample application
opencv_nvgstenc simulates the video encode pipeline.
Both sample applications are based on GStreamer 1.0. They currently are supported by OpenCV version provided in JetPack.
opencv_nvgstcam: Camera capture and preview.
To simulate the camera capture pipeline with the
opencv_nvgstcamsample application, enter the command:$ ./opencv_nvgstcam --help
Note
Currently,
opencv_nvgstcamonly supports single-instance CSI capture using thenvarguscamerasrcplugin. You can modify and rebuild the application to support GStreamer pipelines for CSI multi-instance captures and USB camera captures by using thev4l2srcplugin. The application uses an OpenCV-based video sink for display.For camera CSI capture and preview rendering with OpenCV, enter the command:
$ ./opencv_nvgstcam --width=1920 --height=1080 --fps=30
opencv_nvgstenc: Camera capture and video encode.
To simulate the camera capture and video encode pipeline with the
opencv_nvgstencsample application, enter the command:$ ./opencv_nvgstenc --help
Note
Currently,
opencv_nvgstenconly supports camera CSI capture using thenvarguscamerasrcplugin and video encode in H.264 format by using thenvv4l2h264encplugin with an MP4 container file. You can modify and rebuild the application to support GStreamer pipelines for different video encoding formats. The application uses an OpenCV-based video sink for display.For camera CSI capture and video encode with OpenCV, enter the command:
$ ./opencv_nvgstenc --width=1920 --height=1080 --fps=30 --time=60 \ --filename=test_h264_1080p_30fps.mp4
Video Playback with GStreamer-1.0#
To display nvgstplayer-1.0 usage information, enter the command:
$ nvgstplayer-1.0 --help
Video can be output to HD displays using the HDMI connector on the Jetson device. The GStreamer-1.0 application currently supports the following video sinks:
For overlay sink (video playback on overlay in full-screen mode), enter the command:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \
qtdemux name=demux ! h264parse ! nvv4l2decoder ! nvdrmvideosink -e
Video Playback Examples#
The following examples show how you can perform video playback using GStreamer-1.0.
nveglglessink(windowed video playback, NVIDIA EGL/GLES videosink using default X11 backend):Enter this command to start the GStreamer pipeline using
nveglglesinkwith the default X11 backend:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux ! h264parse ! nvv4l2decoder ! nveglglessink -eSet decoder output memory type to CUDA array memory:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux ! h264parse ! nvv4l2decoder cudadec-memtype=memtype_array ! nveglglessink -eThe
nvgstplayer-1.0application accepts command-line options that specify window position and dimensions for windowed playback:$ nvgstplayer-1.0 -i <filename> --window-x=300 --window-y=300 \ --window-width=500 --window-height=500nveglglessink(windowed video playback, NVIDIA EGL/GLES videosink using Wayland backend):You can use
nveglglessinkwith the Wayland backend instead of the default X11 backend.Ubuntu 20.04 does not support the Wayland display server, which means that there is no UI support to switch Wayland from Xorg. You must start the Wayland server (Weston) by using the target’s shell before performing Weston-based operations.
To start Weston, complete the following steps before you run the GStreamer pipeline the first time with the Wayland backend. The steps are not required after the initial run.
Start Weston:
$ nvstart-weston.sh
To run the GStreamer pipeline with the Wayland backend, run the following command to start the pipeline and use
nveglglesinkwith the Wayland backend:$ gst-launch-1.0 filesrc \ location=<filename.mp4> ! qtdemux name=demux ! h264parse ! \ nvv4l2decoder ! nveglglessink winsys=waylandnvdrmvideosink(video playback using DRM): This sink element uses DRM to render videos on connected displays.The display driver must be stopped, and DRM driver must be loaded before using the
nvdrmvideosink.Stop the display manager:
$ sudo systemctl stop gdm $ sudo loginctl terminate-seat seat0
Load the DRM driver:
For Jetson Orin use $ sudo modprobe nvidia-drm modeset=1
To start the GStreamer pipeline by using
nvdrmvideosink, run the following command:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux! queue ! h264parse ! nvv4l2decoder ! nvdrmvideosink -envdrmvideosinksupports these propertiesconn_id: Set the connector ID for the display.plane_id: Set the plane ID.set_mode: Set the default mode (resolution) for playback.
The following command illustrates the use of these properties:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux! queue ! h264parse ! ! nvv4l2decoder ! nvdrmvideosink \ conn_id=0 plane_id=1 set_mode=0 -env3dsinkvideo sink (video playback using 3D graphics API): This video sink element works with NVMM buffers and renders using the 3D graphics rendering API. It performs better thannveglglessinkwith NVMM buffers.This command starts the GStreamer pipeline using
nv3dsink:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder ! nv3dsink -eThe sink supports setting a specific window position and dimensions using the properties shown in this example:
$ nv3dsink window-x=300 window-y=300 window-width=512 window-height=512
The sink supports the display of video when decoder output memory type is set to CUDA array memory:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux ! queue ! h264parse ! nvv4l2decoder cudadec-memtype=memtype_array ! nv3dsink -e
Video Decode Support with OpenCV#
You can simulate a video decode pipeline using the GStreamer-1.0-based
OpenCV sample application opencv_nvgstdec.
Note
The sample application is supported by OpenCV version provided in JetPack.
To perform video decoding with opencv_nvgstdec, enter the command:
$ ./opencv_nvgstdec --help
Note
Currently, opencv_nvgstdec only supports video decode of H264 format using the nvv4l2decoder plugin. You can modify and rebuild the application to support GStreamer pipelines for video decode of different formats. For display, the application utilizes an OpenCV based video sink component.
To perform video decoding with opencv_nvgstdec, enter the command:
$ ./opencv_nvgstdec --file-path=test_file_h264.mp4
Video Streaming with GStreamer-1.0#
This section describes procedures for video streaming with GStreamer 1.0.
To perform video streaming with nvgstplayer-1.0#
Using nvgstplayer-1.0: Enter the command:
$ nvgstplayer-1.0 -i rtsp://10.25.20.77:554/RTSP_contents/VIDEO/H264/ test_file_h264.3gp --statsThe supported formats for video streaming are:
MPEG4 MPEG4+AAC MPEG4+AAC PLUS MPEG4+eAAC PLUS MPEG4+AMR-NB MPEG4+AMR-WB H263 H263+AAC H263+AAC PLUS H263+AMR-NB H263+AMR-WB H264 H264+AAC H264+AAC PLUS H264+eAAC PLUS H264+AMR-NB H264+AMR-WB AAC AAC PLUS eAAC PLUS AMR-NB AMR-WB Using gst-launch-1.0 pipeline:
Streaming and video rendering:
Transmitting (from target): CSI camera capture + video encode + RTP streaming using network sink:
$ gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), \ format=NV12, width=1920, height=1080' ! \ nvv4l2h264enc insert-sps-pps=true ! h264parse ! \ rtph264pay pt=96 ! udpsink host=127.0.0.1 port=8001 sync=false -eReceiving (on target) : Network Source + video decode + video render:
$ gst-launch-1.0 udpsrc address=127.0.0.1 port=8001 \ caps='application/x-rtp, encoding-name=(string)H264, payload=(int)96' ! \ rtph264depay ! queue ! h264parse ! nvv4l2decoder ! nv3dsink -e
Streaming and file dump:
Transmitting (from target): CSI camera capture + video encode + RTP streaming using network sink:
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), format=NV12, width=1920, height=1080' ! \ nvv4l2h264enc insert-sps-pps=true ! h264parse ! \ rtph264pay pt=96 ! udpsink host=127.0.0.1 port=8001 sync=false -eReceiving (on target): Network Source + video decode + file dump:
$ gst-launch-1.0 udpsrc address=127.0.0.1 port=8001 \ caps='application/x-rtp, encoding-name=(string)H264, payload=(int)96' ! \ rtph264depay ! queue ! h264parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw, format=(string)I420' ! filesink location=test.yuv -e
Video Format Conversion with GStreamer-1.0#
The NVIDIA proprietary nvvidconv GStreamer-1.0 plugin allows conversion between OSS (raw) video formats and NVIDIA video formats. The nvvidconv plugin currently supports the format conversions described in this section.
Raw-YUV Input Formats#
Currently, the VIC-based nvvidconv on Jetson supports the I420, UYVY, YUY2, YVYU, NV12, NV16, NV24, P010_10LE, GRAY8, BGRx, RGBA, Y42B RAW-YUV, Y444, Y444_10LE, and Y444_12LE input formats. The CUDA-based nvvidconv on GPU supports the I420, NV12, P010_10LE, GRAY8, BGRx, RGBA, Y444, Y444_10LE, and Y444_12LE input formats.
Enter the following commands to perform VIC-based conversion on Jetson Linux:
Using the
gst-v4l2encoder (with other than the GRAY8 pipeline):$ gst-launch-1.0 videotestsrc ! 'video/x-raw, format=(string)UYVY, \ width=(int)1280, height=(int)720' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nvv4l2h264enc ! 'video/x-h264, \ stream-format=(string)byte-stream' ! h264parse ! \ qtmux ! filesink location=test.mp4 -eUsing the
gst-v4l2encoder with the GRAY8 pipeline:$ gst-launch-1.0 videotestsrc ! 'video/x-raw, format=(string)GRAY8, \ width=(int)640, height=(int)480, framerate=(fraction)30/1' ! \ nvvidconv ! 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nvv4l2h264enc ! 'video/x-h264, \ stream-format=(string)byte-stream' ! h264parse ! qtmux ! \ filesink location=test.mp4 -e
Enter the following commands to perform CUDA-based conversion on a Jetson Orin integrated GPU:
Note
The gst-v4l2 encoder does not support CUDA memory on Jetson Orin, so the output of the first nvvidconv by using GPU is converted to surface array memory by using VIC.
Using the
gst-v4l2encoder (with other than the GRAY8 pipeline):$ gst-launch-1.0 videotestsrc ! 'video/x-raw, format=(string)NV12, \ width=(int)1280, height=(int)720' ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw, \ format=(string)I420' ! nvvidconv compute-hw=VIC \ nvbuf-memory-type=nvbuf-mem-surface-array ! 'video/x-raw(memory:NVMM)' ! \ nvv4l2h264enc ! 'video/x-h264, \ stream-format=(string)byte-stream' ! h264parse ! \ qtmux ! filesink location=test.mp4 -eUsing the
gst-v4l2encoder with the GRAY8 pipeline:$ gst-launch-1.0 videotestsrc ! 'video/x-raw, format=(string)GRAY8, \ width=(int)640, height=(int)480, framerate=(fraction)30/1' ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw, format=(string)I420' ! nvvidconv compute-hw=VIC \ nvbuf-memory-type=nvbuf-mem-surface-array ! 'video/x-raw(memory:NVMM)' ! \ nvv4l2h264enc ! 'video/x-h264, \ stream-format=(string)byte-stream' ! h264parse ! qtmux ! \ filesink location=test.mp4 -e
Enter the following command to perform CUDA-based format conversion on a Jetson Thor integrated GPU and dedicated GPU:
Note
The gst-v4l2 encoder can directly use the CUDA memory on a Jetson Thor integrated GPU and dedicated GPU.
Using the
gst-v4l2encoder:$ gst-launch-1.0 filesrc location=input_4k_60p.yuv ! videoparse width=3840 \ height=2160 format=i420 framerate=60 ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=(int)3840, height=(int)2160, format=(string)I420, framerate=60/1' ! \ nvv4l2h264enc ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! h264parse ! qtmux ! \ filesink location=test.mp4 -e
Note
Format conversion with raw YUV input is CPU-intensive due to the “software to hardware” memory copies involved.
Raw-YUV Output Formats#
Currently, the VIC-based nvvidconv on Jetson supports the I420, UYVY, YUY2, YVYU, NV12, NV16, NV24, GRAY8, BGRx, RGBA, Y42B RAW-YUV, Y444, Y444_10LE, and Y444_12LE output formats. The CUDA-based nvvidconv on GPU supports the I420, NV12, P010_10LE, I420_10LE, GRAY8, BGRx, RGBA, Y444, Y444_10LE, and Y444_12LE output formats.
Enter the following commands to perform VIC-based format conversion on Jetson Linux:
Using the
gst-v4l2decoder (with other than the GRAY8 pipeline):$ gst-launch-1.0 filesrc location=640x480_30p.mp4 ! qtdemux ! \ queue ! h264parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw, format=(string)UYVY' ! videoconvert ! xvimagesink -eUsing the
gst-v4l2decoder with the GRAY8 pipeline:$ gst-launch-1.0 filesrc location=720x480_30i_MP.mp4 ! qtdemux ! \ queue ! h264parse ! nvv4l2decoder ! nvvidconv ! 'video/x-raw, \ format=(string)GRAY8' ! videoconvert ! xvimagesink -e
Enter the following command to perform CUDA-based format conversion on Jetson Linux:
Using the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=640x480_30p.mp4 ! qtdemux ! \ queue ! h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! nv3dsink -e
Enter the following command to perform CUDA-based format conversion on a dedicated GPU:
Using the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=720x480_30i_MP.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder cudadec-memtype=1 ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! nveglglessink -e
Note
Format conversion with raw YUV output is CPU-intensive due to the “hardware to software” memory copies involved.
NVIDIA Input and Output Formats#
Currently CUDA based nvvidconv on GPU supports the I420, NV12, P010_10LE, GRAY8, BGRx and RGBA input formats and supports the I420, NV12, P010_10LE, I420_10LE, GRAY8, BGRx and RGBA output formats and VIC based nvvidconv on Jetson supports the combinations of NVIDIA input and output formats described in the following table. Any format in the column on the left can be converted to any format in the same row in the column on the right.
|
NV12 NV24 |
NV16 |
NV12 NV24 |
NV16 |
|
I420 I420_12LE |
I420_10LE P010_10LE |
I420 |
I420_10LE P010_10LE |
|
UYVY YVYU BGRx GRAY8 |
YUY2 Y42B RGBA |
UYVY YVYU BGRx GRAY8 |
YUY2 Y42B RGBA |
Enter the following commands to perform VIC-based conversion between NVIDIA formats on Jetson Linux:
Using the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)RGBA' ! nvdrmvideosink -eUsing the
gst-v4l2encoder:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nvv4l2h264enc ! \ h264parse ! qtmux ! filesink location=test.mp4 -eUsing the
gst-v4l2decoder and nv3dsink with the GRAY8 pipeline:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)GRAY8' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nv3dsink -e
Enter the following commands to perform CUDA-based conversion between NVIDIA formats on Jetson Linux:
Using the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)RGBA' ! nv3dsink -e
Note
The gst-v4l2 encoder does not support CUDA memory on Jetson Orin, so the output of the first nvvidconv by using GPU is converted to surface array memory by using VIC.
Using the
gst-v4l2encoder:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw, format=(string)I420' ! \ nvvidconv compute-hw=VIC nvbuf-memory-type=nvbuf-mem-surface-array ! \ 'video/x-raw(memory:NVMM)' ! nvv4l2h264enc ! \ h264parse ! qtmux ! filesink location=test.mp4 -eUsing the
gst-v4l2decoder and nv3dsink with the GRAY8 pipeline:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)GRAY8' ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nv3dsink -e
Enter the following commands to perform CUDA-based conversion between NVIDIA formats on a Jetson Thor integrated GPU and dedicated GPU:
Note
The gst-v4l2 encoder can directly use the CUDA memory on a Jetson Thor integrated GPU and dedicated GPU.
Using the
gst-v4l2encoder:$ gst-launch-1.0 filesrc location=input_4k_60p_NV12.yuv ! videoparse width=3840 \ height=2160 format=23 framerate=60 ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=(int)3840, height=(int)2160, format=(string)I420, framerate=60/1' ! \ nvv4l2h264enc ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! h264parse ! qtmux ! \ filesink location=test.mp4 -eUsing the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=1280, height=720, format=(string)I420 ! nveglglessink -e
Video Scaling with GStreamer-1.0#
The NVIDIA proprietary nvvidconv GStreamer-1.0 plugin also allows you to
perform video scaling. The nvvidconv plugin currently supports scaling
with the format conversions described in this section.
Raw-YUV input formats:
Currently VIC based
nvvidconvon Jetson supports the I420, UYVY, YUY2, YVYU, NV12, NV16, NV24, P010_10LE, GRAY8, BGRx, RGBA, and Y42B RAW-YUV input formats for scaling and CUDA basednvvidconvon GPU supports the I420, NV12, P010_10LE, GRAY8, BGRx and RGBA input formats for scaling.Using the
gst-v4l2encoder and perform VIC based scaling on Jetson Linux:$ gst-launch-1.0 videotestsrc ! \ 'video/x-raw, format=(string)I420, width=(int)1280, \ height=(int)720' ! nvvidconv ! \ 'video/x-raw(memory:NVMM), width=(int)640, height=(int)480, \ format=(string)I420' ! nvv4l2h264enc ! \ 'video/x-h264, stream-format=(string)byte-stream' ! h264parse ! \ qtmux ! filesink location=test.mp4 -e
Note
The gst-v4l2 encoder does not support CUDA memory on Jetson Orin, so the output of the first nvvidconv by using GPU is converted to surface array memory by using VIC.
Using the
gst-v4l2encoder and perform CUDA-based scaling on a Jetson Orin integrated GPU:$ gst-launch-1.0 videotestsrc ! \ 'video/x-raw, format=(string)I420, width=(int)1280, \ height=(int)720' ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw, width=(int)640, height=(int)480, \ format=(string)I420' ! nvvidconv compute-hw=VIC \ nvbuf-memory-type=nvbuf-mem-surface-array ! \ 'video/x-raw(memory:NVMM)' ! nvv4l2h264enc ! \ 'video/x-h264, stream-format=(string)byte-stream' ! h264parse ! \ qtmux ! filesink location=test.mp4 -e
Note
The gst-v4l2 encoder can directly use the CUDA memory on a Jetson Thor integrated GPU and dedicated GPU.
Using the
gst-v4l2encoder and perform CUDA-based scaling on a Jetson Thor integrated GPU and dedicated GPU:$ gst-launch-1.0 filesrc location=input_4k_60p.yuv ! videoparse width=3840 \ height=2160 format=i420 framerate=60 ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=(int)1920, height=(int)1080, format=(string)I420, framerate=60/1' ! \ nvv4l2h264enc ! 'video/x-h264, stream-format=(string)byte-stream, \ alignment=(string)au' ! h264parse ! qtmux ! \ filesink location=test.mp4 -e
Note
Video scaling with raw YUV input is CPU-intensive due to the “software to hardware” memory copies involved.
Raw-YUV Output Formats:
Currently VIC based
nvvidconvon Jetson supports the I420, UYVY, YUY2, YVYU, NV12, NV16, NV24, GRAY8, BGRx, RGBA, and Y42B RAW-YUV output formats for scaling and CUDA basednvvidconvon GPU supports the I420, NV12, GRAY8, BGRx, RGBA, and I420_10LE output formats for scaling.Using the
gst-v4l2decoder and perform VIC based scaling on Jetson Linux:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ queue ! h264parse ! nvv4l2decoder ! nvvidconv ! \ 'video/x-raw, format=(string)I420, width=640, height=480' ! \ xvimagesink -eUsing the
gst-v4l2decoder and perform CUDA-based scaling on Jetson Linux:$ gst-launch-1.0 filesrc location=1280x720_30p.mp4 ! qtdemux ! \ queue ! h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw, format=(string)I420, width=640, height=480' ! \ nv3dsink -eUsing the
gst-v4l2decoder and perform CUDA-based scaling on a dedicated GPU:$ gst-launch-1.0 filesrc location = 1280x720_30p.mp4 ! qtdemux ! \ h264parse ! nvv4l2decoder cudadec-memtype=1 ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=640, height=480' ! nveglglessink -e
Note
Video scaling with raw YUV output is CPU-intensive due to the “hardware to software” memory copies involved.
Video Cropping with GStreamer-1.0#
The NVIDIA proprietary nvvidconv GStreamer-1.0 plugin also allows you to
perform video cropping:
Using the
gst-v4l2decoder and perform VIC based cropping on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! \ nvvidconv left=400 right=1520 top=200 bottom=880 ! nv3dsink -eUsing the
gst-v4l2decoder and perform CUDA-based cropping on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device \ left=400 right=1520 top=200 bottom=880 ! nv3dsink -e
Video Transcode with GStreamer-1.0#
You can perform video transcoding between the following video formats.
H.264 decode to AV1 Encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvv4l2av1enc ! matroskamux name=mux ! \ filesink location=<Transcoded_filename.mkv> -e
This feature is not supported on Jetson Thor because the AV1 encoder is not supported.
H.265 decode to AV1 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.video_0 ! queue ! h265parse ! nvv4l2decoder ! \ nvv4l2av1enc bitrate=20000000 ! queue ! matroskamux name=mux ! \ filesink location=<Transcoded_filename.mkv> -e
This feature is not supported on Jetson Thor because the AV1 encoder is not supported.
VP8 decode to H.264 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mebm> ! \ matroskademux name=demux demux.video_0 ! queue ! nvv4l2decoder ! \ nvv4l2h264enc bitrate=20000000 ! h264parse ! queue ! \ qtmux name=mux ! filesink location=<Transcoded_filename.mp4> -e
VP9 decode to H.265 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.webm> ! \ matroskademux name=demux demux.video_0 ! queue ! nvv4l2decoder ! \ nvv4l2h265enc bitrate=20000000 ! h265parse ! queue ! \ qtmux name=mux ! filesink location=<Transcoded_filename.mp4> -e
MPEG-4 decode to AV1 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.video_0 ! queue ! mpeg4videoparse ! \ nvv4l2decoder ! nvv4l2av1enc bitrate=20000000 ! queue ! \ matroskamux name=mux ! filesink \ location=<Transcoded_filename.mkv> -e
This feature is not supported on Jetson Thor because the AV1 encoder is not supported.
MPEG-4 decode to H.264 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.video_0 ! queue ! mpeg4videoparse ! \ nvv4l2decoder ! nvv4l2h264enc bitrate=20000000 ! h264parse ! \ queue ! qtmux name=mux ! filesink \ location=<Transcoded_filename.mp4> -e
H.264 decode to AV1 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.video_0 ! queue ! h264parse ! \ nvv4l2decoder ! nvv4l2av1enc bitrate=20000000 ! queue ! \ matroskamux name=mux ! \ filesink location=<Transcoded_filename.mkv> -e
This feature is not supported on Jetson Thor because the AV1 encoder is not supported.
H.265 decode to AV1 encode (NVIDIA accelerated decode to NVIDIA accelerated encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux demux.video_0 ! queue ! h265parse ! \ nvv4l2decoder ! nvv4l2av1enc bitrate=20000000 ! queue ! \ matroskamux name=mux ! \ filesink location=<Transcoded_filename.mkv> -e
This feature is not supported on Jetson Thor because the AV1 encoder is not supported.
VP8 decode to MPEG-4 encode (NVIDIA accelerated decode to OSS software encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mkv> ! \ matroskademux name=demux demux.video_0 ! queue ! nvv4l2decoder ! \ nvvidconv ! avenc_mpeg4 bitrate=4000000 ! queue ! \ qtmux name=mux ! filesink location=<Transcoded_filename.mp4> -e
VP9 decode to MPEG-4 encode (NVIDIA accelerated decode to OSS software encode):
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename.mkv> ! \ matroskademux name=demux demux.video_0 ! queue ! nvv4l2decoder ! \ nvvidconv ! avenc_mpeg4 bitrate=4000000 ! qtmux name=mux ! \ filesink location=<Transcoded_filename.mp4> -e
Dynamic Resolution Change is supported for the Transcode pipeline:
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<resolution_change_file.mp4> ! \ qtdemux name=demux demux.video_0 ! h264parse ! nvv4l2decoder ! \ nvv4l2h264enc ! h264parse ! filesink location=<drc_reencoded.h264> -e
Transcode using CUDA array memory type:
$ gst-launch-1.0 filesrc location=<filename_h264.264> ! \
h264parse ! nvv4l2decoder cudadec-memtype=memtype_array ! \
nvv4l2h264enc ! 'video/x-h264, profile=baseline' ! \
h264parse ! qtmux ! filesink location=<transcoded_h264.mp4> -e
This feature is supported only on Jetson Thor.
CUDA Video Post-Processing with GStreamer-1.0#
This section describes GStreamer-1.0 plugins for NVIDIA® CUDA® post-processing operations.
gst-nvivafilter#
This NVIDIA proprietary GStreamer-1.0 plugin performs pre/post and CUDA post-processing operations on CSI camera captured or decoded frames, and renders video using overlay video sink or video encode.
Note
The gst-nvivafilter pipeline requires unsetting the DISPLAY environment variable using the command unset DISPLAY if lightdm is stopped.
Sample decode pipeline:
Using the
gst-v4l2decoder:$ gst-launch-1.0 filesrc location=<filename.mp4> ! qtdemux ! queue ! \ h264parse ! nvv4l2decoder ! nvivafilter cuda-process=true \ customer-lib-name="libnvsample_cudaprocess.so" ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvdrmvideosink -e
Sample CSI camera pipeline:
$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)3840, height=(int)2160, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvivafilter cuda-process=true \ customer-lib-name="libnvsample_cudaprocess.so" ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! nv3dsink -e
The gst-nvivafilter plug-in now supports the following features:
Set the memory type on which the CUDA process will execute:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! qtdemux ! queue ! \ h264parse ! nvv4l2decoder ! nvivafilter cuda-process=true \ customer-lib-name="libnvsample_cudaprocess.so" nvbuf-memory-type=nvbuf-mem-cuda-pinned ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nv3dsink -eSet the GPU ID for the CUDA process:
$ gst-launch-1.0 filesrc location=<filename.mp4> ! qtdemux ! queue ! \ h264parse ! nvv4l2decoder ! nvivafilter cuda-process=true \ customer-lib-name="libnvsample_cudaprocess.so" gpu-id=0 ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nveglglessink -e
Note
See nvsample_cudaprocess_src.tbz2 for the libnvsample_cudaprocess.so library sources. The sample CUDA implementation of libnvsample_cudaprocess.so can be replaced by a custom CUDA implementation.
Video Rotation with GStreamer-1.0#
The NVIDIA proprietary nvvidconv GStreamer-1.0 plugin also allows you to perform video rotation operations.
The following table shows the supported values for the nvvidconv flip-method property.
Flip method |
|
|---|---|
Identity (no rotation. default) |
0 |
Counterclockwise 90 degrees |
1 |
Rotate 180 degrees |
2 |
Clockwise 90 degrees |
3 |
Horizontal flip |
4 |
Upper right diagonal flip |
5 |
Vertical flip |
6 |
Upper left diagonal flip |
7 |
Note
To get information on the nvvidconv flip-method property, enter the command:
$ gst-inspect-1.0 nvvidconv
To rotate the video 90 degrees counterclockwise:
With
gst-v4l2decoder and perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux name=demux ! h264parse ! nvv4l2decoder ! \ nvvidconv flip-method=1 ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nvdrmvideosink -eWith
gst-v4l2decoder and perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device \ flip-method=1 ! 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nv3dsink -e
To rotate the video 90 degrees clockwise:
With
gst-v4l2decoder and perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! \ nvvidconv flip-method=3 ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nvdrmvideosink -eWith
gst-v4l2decoder and perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! \ nvvidconv flip-method=3 compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! \ nv3dsink -e
To rotate 180 degrees:
With
nvarguscamerasrcand perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvvidconv flip-method=2 ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nv3dsink -eWith
nvarguscamerasrcand perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvvidconv flip-method=2 compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)I420' ! nv3dsink -e
To scale and rotate the video 90 degrees counterclockwise:
Using the
gst-v4l2decoder and perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv flip-method=1 ! \ 'video/x-raw(memory:NVMM), width=(int)480, height=(int)640, \ format=(string)I420' ! nvdrmvideosink -eUsing the
gst-v4l2decoder and perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! nvvidconv flip-method=1 \ compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), width=(int)480, height=(int)640, \ format=(string)I420' ! nv3dsink -e
To scale and rotate the video 90 degrees clockwise:
With
nvarguscamerasrcand perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvvidconv flip-method=3 ! 'video/x-raw(memory:NVMM), \ width=(int)480, height=(int)640, format=(string)I420' ! \ nv3dsink -eWith
nvarguscamerasrcand perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 nvarguscamerasrc ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=(fraction)30/1' ! \ nvvidconv flip-method=3 compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! 'video/x-raw(memory:NVMM), \ width=(int)480, height=(int)640, format=(string)I420' ! \ nv3dsink -e
To scale and rotate the video 180 degrees:
Using the
gst-v4l2decoder and perform VIC based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! nvvidconv flip-method=2 ! \ 'video/x-raw(memory:NVMM), width=(int)640, height=(int)480, \ format=(string)I420' ! nvdrmvideosink -eUsing the
gst-v4l2decoder and perform CUDA-based rotation on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! nvvidconv flip-method=2 \ compute-hw=GPU nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), width=(int)640, height=(int)480, \ format=(string)I420' ! nv3dsink -e
Video Composition with GStreamer-1.0#
With the NVIDIA proprietary nvcompositor GStreamer-1.0 plugin, you can perform video composition operations on camera and gst-v4l2 video decoded streams.
To composite decoded streams with different formats#
Using the
gst-v4l2decoder:$ gst-launch-1.0 nvcompositor \ name=comp sink_0::xpos=0 sink_0::ypos=0 sink_0::width=1920 \ sink_0::height=1080 sink_1::xpos=0 sink_1::ypos=0 \ sink_1::width=1600 sink_1::height=1024 sink_2::xpos=0 \ sink_2::ypos=0 sink_2::width=1366 sink_2::height=768 \ sink_3::xpos=0 sink_3::ypos=0 sink_3::width=1024 \ sink_3::height=576 ! 'video/x-raw(memory:NVMM)' ! nv3dsink \ filesrc location=<filename_h264_1080p_30fps.mp4> ! qtdemux ! \ h264parse ! nvv4l2decoder ! comp. filesrc \ location=<filename_h265_1080p_30fps.mp4> ! qtdemux ! h265parse ! \ nvv4l2decoder ! comp. filesrc \ location=<filename_av1_1080p_30fps.webm> ! matroskademux ! \ nvv4l2decoder ! comp. filesrc \ location=<filename_vp9_1080p_30fps.webm> ! \ matroskademux ! nvv4l2decoder ! comp. -e
To composite different camera feeds#
Using the
nvarguscamerasrc:$ gst-launch-1.0 nvcompositor \ name=comp sink_0::xpos=960 sink_0::ypos=540 sink_0::width=960 \ sink_0::height=540 sink_1::width=1920 sink_1::height=1080 ! \ 'video/x-raw(memory:NVMM)' ! queue ! nv3dsink \ nvarguscamerasrc sensor-id=0 ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=30/1' ! comp. \ nvarguscamerasrc sensor-id=1 ! \ 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, \ format=(string)NV12, framerate=30/1' ! comp. -e
Interpolation Methods for Video Scaling#
The NVIDIA proprietary nvvidconv GStreamer-1.0 plugin allows you to
choose the interpolation method used for scaling.
The following table shows the supported values for the VIC based nvvidconv
interpolation-method property on Jetson.
Interpolation method |
|
|---|---|
Nearest (default) |
0 |
Bilinear |
1 |
5-tap |
2 |
10-tap |
3 |
Smart |
4 |
Nicest |
5 |
The following table shows the supported values for the CUDA based nvvidconv
interpolation-method property on GPU.
Interpolation method |
|
|---|---|
Nearest (default) |
0 |
Bilinear |
1 |
Cubic |
2 |
Super |
3 |
Lanczos |
4 |
Note
To display information about the nvvidconv interpolation-method property, enter the command:
$ gst-inspect-1.0 nvvidconv
To use bilinear interpolation method for scaling#
Using the
gst-v4l2pipeline and perform VIC based scaling on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4>! \ qtdemux name=demux ! h264parse ! nvv4l2decoder ! \ nvvidconv interpolation-method=1 ! \ 'video/x-raw(memory:NVMM), format=(string)I420, width=1280, \ height=720' ! nvdrmvideosink -eUsing the
gst-v4l2pipeline and perform CUDA-based scaling on Jetson Linux:$ gst-launch-1.0 filesrc location=<filename_1080p.mp4> ! \ qtdemux name=demux ! h264parse ! nvv4l2decoder ! \ nvvidconv interpolation-method=1 compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-cuda-device ! \ 'video/x-raw(memory:NVMM), format=(string)I420, width=1280, \ height=720' ! nv3dsink -e
EGLStream Producer Example#
The NVIDIA proprietary nveglstreamsrc and nvvideosink GStreamer-1.0
plugins allow simulation of an EGLStream producer pipeline (for preview only.)
To simulate an EGLStream producer pipeline, enter the command:
$ nvgstcapture-1.0 --camsrc=3
EGL Image Transform Example#
The NVIDIA proprietary nvegltransform GStreamer-1.0 plugin allows simulation of an EGLImage transform pipeline.
To simulate an EGL Image transform pipeline:
Using the
gst-v4l2pipeline:$ gst-launch-1.0 filesrc location=<filename_h264_1080p.mp4> ! \ qtdemux ! h264parse ! nvv4l2decoder ! nvegltransform ! nveglglessink -e
Note
The nvegltransform plugin is supported on Jetson Orin and converts surface array memory (NvBufSurface) into EGLImage format.
Video Deinterlacing with GStreamer-1.0#
The NVIDIA proprietary nvdeinterlace GStreamer-1.0 plugin converts
interlaced video frames to progressive video frames.
It supports two compute backends:
VIC (Video Image Compositor): Available on the Jetson Orin.
GPU (CUDA-based): Available on the Jetson Orin and Jetson Thor.
Note
On Jetson Thor, only the GPU backend is supported.
Supported Formats#
Sink (input):
video/x-raw(memory:NVMM)with formatUYVYorNV12.Source (output):
video/x-raw(memory:NVMM)with formatNV12.
The element expects the input buffer to carry the
GST_VIDEO_BUFFER_FLAG_INTERLACED flag (typically signaled by upstream
or by adding interlaced=1 to videoparse when feeding
raw fields through appsrc).
nvdeinterlace Properties#
The following properties are exposed by nvdeinterlace. Use
gst-inspect-1.0 nvdeinterlace on the target to view runtime defaults.
Property |
Description |
Values |
|---|---|---|
|
Deinterlacing algorithm. Bob is not
supported on the GPU backend; when
|
bob (1): default for VIC backendadvanced2-framerate (2): default for
GPU backendadvanced2-fieldrate (3) |
|
Field layout (which field is first in time).
When set to |
auto (0): defaulttff (1): top field firstbff (2): bottom field first |
|
Compute backend. |
Default (0): platform-specific;
VIC on Orin, GPU on ThorVIC (1): Orin onlyGPU (2) |
|
Type of |
nvbuf-mem-default (0)nvbuf-mem-cuda-pinned (1)nvbuf-mem-cuda-device (2) |
|
GPU device ID for GPU processing. Ignored for the VIC backend. |
0–n (default: 0) |
Deinterlacing Modes#
Mode |
Value |
VIC |
GPU |
Output rate |
|---|---|---|---|---|
|
1 |
Yes (default) |
No |
One progressive frame per input field |
|
2 |
Yes |
Yes (default) |
One progressive frame per input frame |
|
3 |
Yes |
Yes |
One progressive frame per input field |
Examples#
The following examples demonstrate nvdeinterlace with various sources
(filesrc, appsrc), backends (VIC, GPU, Default), and modes
(field-rate, frame-rate). All examples use 1080i interlaced input and produce
NV12 progressive output.
Decode to File (GPU Backend, Field Rate)#
Note
The avdec_h264 decoder outputs interlaced frames in the
line-interleaved layout: Within each plane (Y and UV), the two
fields are interleaved at the line level. The top field occupies the even
lines (0, 2, 4, …) and the bottom field occupies the odd lines
(1, 3, 5, …); UV is interleaved on the same even/odd line pattern with
chroma sub-sampling.
This is the layout consumed by the GPU backend of nvdeinterlace.
The VIC backend expects field-sequential input instead, so
piping avdec_h264 directly into nvdeinterlace compute-hw=VIC
produces visually corrupted output even though the pipeline runs without
error.
Decode an H.264 1080i clip and run the GPU-based deinterlace in field-rate
mode (mode=3), writing raw NV12 frames to a file:
$ gst-launch-1.0 filesrc location=<filename_h264_1080i.mp4> ! \
qtdemux ! h264parse ! avdec_h264 ! \
nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nvdeinterlace compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default mode=3 ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \
'video/x-raw, format=NV12' ! filesink location=output_field.yuv -e
Decode to File (GPU Backend, Frame Rate)#
Same as the preceding example but using frame-rate mode (mode=2):
$ gst-launch-1.0 filesrc location=<filename_h264_1080i.mp4> ! \
qtdemux ! h264parse ! avdec_h264 ! \
nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nvdeinterlace compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default mode=2 ! \
'video/x-raw(memory:NVMM), format=(string)NV12' ! \
nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \
'video/x-raw, format=NV12' ! filesink location=output_frame.yuv -e
To use CUDA pinned or device memory along the GPU path, replace
nvbuf-memory-type=nvbuf-mem-default with
nvbuf-memory-type=nvbuf-mem-cuda-pinned or
nvbuf-memory-type=nvbuf-mem-cuda-device.
Raw Interlaced YUV with appsrc#
Push raw 1080i NV12 fields into the pipeline through appsrc and
deinterlace them. The same gst-launch syntax is used for both backends; only
the value of compute-hw changes. The application running appsrc is
responsible for filling each input buffer in the layout expected by the
chosen backend (see the note following this example).
VIC backend, field-rate (Jetson Orin only):
$ gst-launch-1.0 appsrc name=appsrc ! \ videoparse width=1920 height=1080 format=23 interlaced=1 ! \ nvvidconv ! 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvdeinterlace tff=1 compute-hw=VIC mode=3 ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvvidconv ! 'video/x-raw, format=NV12' ! \ filesink location=output_vic_field.yuvGPU backend, field-rate (Jetson Orin and Jetson Thor):
$ gst-launch-1.0 appsrc name=appsrc ! \ videoparse width=1920 height=1080 format=23 interlaced=1 ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvdeinterlace tff=1 compute-hw=GPU \ nvbuf-memory-type=nvbuf-mem-default mode=3 ! \ 'video/x-raw(memory:NVMM), format=(string)NV12' ! \ nvvidconv compute-hw=GPU nvbuf-memory-type=nvbuf-mem-default ! \ 'video/x-raw, format=NV12' ! \ filesink location=output_gpu_field.yuv
Note
The two backends expect different in-memory layouts for the two fields
of an interlaced frame. When the upstream is a decoder
(avdec_h264), this difference is handled automatically.
When feeding raw fields through appsrc, the application must
implement two different read routines and pick the right one
based on compute-hw:
VIC backend (field-sequential/planar fields): Within each plane (Y and UV), the top field is stored in the first half of the plane and the bottom field is stored in the second half. That is, all top-field lines come first, followed by all bottom-field lines.
GPU backend (line-interleaved/woven fields): The two fields are interleaved at the line level within each plane. The top field occupies the even lines (0, 2, 4, …) and the bottom field occupies the odd lines (1, 3, 5, …). UV is interleaved on the same even/odd line pattern with chroma sub-sampling.
Pushing a buffer that is laid out for the wrong backend produces visually corrupted output even though the pipeline runs without error.
GStreamer Build Instructions#
To build the GStreamer manually, please follow the GStreamer guide for 1.20.3 version, GStreamer.
The NVIDIA gstreamer-1.0 libraries include:
libgstnvarguscamera.solibgstnvv4l2camerasrc.solibgstnvcompositor.solibgstnvdeinterlace.solibgstnvdrmvideosink.solibgstnveglglessink.solibgstnveglstreamsrc.solibgstnvegltransform.solibgstnvivafilter.solibgstnvjpeg.solibgstnvtee.solibgstnvvidconv.solibgstnvvideo4linux2.solibgstnvvideocuda.solibgstnvvideosink.solibgstnvvideosinks.so
nvgstcapture-1.0 Reference#
This section describes the nvgstcapture-1.0 application.
Note
By default, nvgstcapture-1.0 only supports the Argus API using the nvarguscamerasrc plugin.
Command-Line Options#
To display command usage information, run nvgstcapture-1.0 with one of these command-line options:
-hor--help: Shows command-line options except for GStreamer options.--help-all: Shows all command-line options.--help-get: Shows GStreamer command-line options.
The following table describes the application’s other command-line options:
nvgstcapture-1.0 command line options |
|||
|---|---|---|---|
| Option | Description | Value and examples | |
| --prev_res | Preview width and height. |
Range: 2 to 8 (3840×2160)
|
|
| --cus-prev-res | Preview custom width and height (CSI only). | --cus-prev-res=1920x1080 |
|
| --image_res | Image width and height. |
Range: 2 to 12 (5632x4224)
|
|
| --video-res | Video width and height. |
Range: 2 to 9 (3896x2192)
|
|
| --camsrc | Camera source to use. |
0: V4L2 1: csi (default) 2: videotest 3: eglstream |
|
|
-m --mode |
Capture mode. |
1: still 2: video |
|
|
-v --video_inc |
Video encoder type. |
0: h264[HW][Default] 2: h265[HW] 4: h264 [SW] [Default for Jetson Orin Nano] |
|
|
-p --hw-enc-path |
Framework Type. |
0: CMX 1: V4L2 |
|
|
-b --enc-bitrate |
Video encoding bit-rate (in bytes). | --enc-bitrate=4000000 |
|
| --enc-controlrate | Video encoding bit rate control method. |
0: disabled 1: variable (default) 2: constant |
|
| --enc-EnableTwopassCBR | Enable two-pass CBR while encoding. |
0: disabled 1: enabled |
|
| --enc-profile | Video encoder profile (only for H.264). |
0: baseline 1: main 2: high |
|
| -j, --image_enc | Image encoder type. |
0: jpeg_SW[jpegenc] 1: jpeg_HW[nvjpegenc] |
|
| -k, --file_type | Container file type. |
0: MP4 1: 3GP 2: MKV |
|
| --file-name | Captured file name. ``nvcamtest`` is used by default. | ||
| --color-format | Color format to use. |
0: I420 1: NV12[For CSI only and default for CSI] 2: YUY2[For V4L2 only, default for V4L2] |
|
| --orientation | Camera sensor orientation value. | ||
| --eglConfig | EGL™ window coordinates in (x, y) order. | --eglConfig="50 100" |
|
|
-w --whitebalance | Capture white balance value. | ||
| --timeout | Capture timeout value. | ||
| --saturation | Camera saturation value. | ||
| --sensor-id | Camera Sensor ID value. | ||
| --display-id | [For nvoverlaysink only] Display ID value. | ||
| --overlayConfig | Overlay configuration options index and coordinates in (index, x, y, width, height) order. | --overlayConfig="0, 0, 0, 1280, 720" |
|
| --cap-dev-node | Video capture device node. |
0: /dev/video0[default] 1: /dev/video1 2: /dev/video2
|
|
| --svs=<chain> |
Where For USB, specifies a chain for video preview.
For CSI only, use |
||
| --exposuretimerange | Property to adjust exposure time range, in nanoseconds. | --exposuretimerange="34000 358733000" |
|
| --gainrange | Property to adjust gain range. | --gainrange="1 16" |
|
| --ispdigitalgainrange | Property to adjust digital gain range. |
Range value from 1 to 256.
|
|
| --aelock | Enable AE lock. | Default is disabled. | |
| --awblock | Enable AWB lock. | Default is disabled. | |
| --exposurecompensation | Property to adjust exposure compensation. |
Range value from −2.0 to 2.0.
|
|
| --aeantibanding | Property to set the auto exposure antibanding mode. |
Range value from 0 to 3.
|
|
| --tnr-mode | Property to select temporal noise reduction mode. | --tnr-mode=2
|
|
| --tnr-strength | Property to adjust temporal noise reduction strength. | --tnr-strength=0.5 |
|
| --ee-mode | Property to select edge enhancement mode. | --ee-mode=2
|
|
| --ee-strength | Property to adjust edge enhancement strength. | --ee-strength=0.5 |
|
CSI Camera Supported Resolutions#
CSI camera supports the following image resolutions for Nvarguscamera:
640×480
1280×720
1920×1080
2104×1560
2592×1944
2616×1472
3840×2160
3896×2192
4208×3120
5632×3168
5632×4224
CSI Camera Runtime Commands#
Options for nvarguscamerasrc#
The following table describes CSI camera runtime command-line options for nvarguscamerasrc.
Nvarguscamera command-line options |
||
|---|---|---|
Command |
Description |
Value and examples |
h |
Help. |
— |
q |
Quit. |
— |
mo:<value> |
Set capture mode. |
1: image 2: video |
gmo |
Get capture mode. |
— |
so:<val> |
Set sensor orientation. |
0: none 1: rotate counter-clockwise 90° 2: rotate 180° 3: rotate clockwise 90° |
gso |
Get sensor orientation. |
— |
wb:<value> |
Set white balance mode. |
0: off 1: auto 2: incandescent 3: fluorescent 4: warm-fluorescent 5: daylight 6: cloudy-daylight 7: twilight 8: shade 9: manual |
gwb |
Get white balance mode. |
— |
st:<value> |
Set saturation. |
0-2 Example: |
gst |
Get saturation. |
— |
j |
Capture one image. |
— |
jx<sec> |
Capture after a delay of
|
— Example: |
j:<value> |
Capture |
— Example: |
0 |
Stop recording video. |
— |
1 |
Start recording video. |
— |
2 |
Video snapshot (while recording video). |
— |
gpcr |
Get preview resolution. |
— |
gicr |
Get image capture resolution. |
— |
gvcr |
Get video capture resolution. |
— |
USB Camera Runtime Commands#
The following table describes USB camera runtime commands.
USB camera runtime commands |
||
|---|---|---|
Command |
Description |
Value and examples |
h |
Help. |
— |
q |
Quit. |
— |
mo:<value> |
Set capture mode. |
1: image 2: video |
gmo |
Get capture mode. |
— |
j |
Capture one image. |
— |
jx<ms> |
Capture after a delay of
|
— Example: |
j:<n> |
Capture |
— Example: |
1 |
Start recording video. |
— |
0 |
Stop recording video. |
— |
pcr:<value> |
Set preview resolution. |
0: 176×144 1: 320×240 2: 640×480 3: 1280×720 |
gpcr |
Get preview resolution. |
— |
gicr |
Get image capture resolution. |
— |
gvcr |
Get video capture resolution. |
— |
br:<value> |
Set encoding bit rate in bytes. |
Example: |
gbr |
Get encoding bit rate. |
— |
cdn:<value> |
Set capture device node. |
0: 1: 2: |
gcdn |
Get capture device node. |
— |
Runtime Video Encoder Configuration Options#
The following table describes runtime video encoder configuration
options supported for nvarguscamerasrc.
Runtime video encoder options |
||
|---|---|---|
Command |
Description |
Value and examples |
br:<val> |
Sets encoding bit-rate in bytes. |
Example: |
gbr |
Gets encoding bit-rate in bytes. |
— |
ep:<val> |
Sets encoding profile (for H.264 only). |
0: baseline 1: main 2: high Example: |
gep |
Gets encoding profile (for H.264 only). |
— |
f |
Forces IDR frame on video encoder (for H.264 only). |
— |
Notes#
nvgstcapture-1.0generates image and video output files in the same directory as the application itself.Filenames are respectively in these formats:
Image content:
nvcamtest_<pid>_<sensor_id>_<counter>.jpgVideo content:
nvcamtest_<pid>_<sensor_id>_<counter>.mp4
Where:
<pid>is the process ID.<sensor_id>is the sensor ID.<counter>is a counter starting from 0 each time the application is run.
Rename or move files between runs to avoid overwriting results you want to save.
The application supports native capture mode (video only) by default.
Advanced features, such as setting zoom, brightness, exposure, and whitebalance levels, are not supported for USB cameras.
nvgstplayer-1.0 Reference#
This section describes the operation of the the nvgstplayer-1.0 application.
nvgstplayer-1.0 Command-Line Options#
Note
To list supported options, enter the command:
$ nvgstplayer-1.0 --help
This table describes nvgstplayer-1.0 command-line options.
nvgstplayer-1.0 command line options |
||
|---|---|---|
| Option | Description and examples | |
| -u <path> --urifile <path> |
Path of the file containing the URIs. Example: |
|
|
-i <uri> --uri <uri> |
Input URI. Examples: |
|
|
-e <path> --elemfile <path> |
Elements (Properties) file. The element file may contain an audio or video processing elements chain. Examples: |
|
|
-x --cxpr |
Command sequence expression. Example: |
|
|
-n <n> --loop <n> |
Number of times to play the media. |
|
|
-c <n> --audio-track <n> |
If a stream has multiple audio tracks, specifies the track number to play |
|
|
-v <n> --video-track <n> |
If a stream has multiple video tracks, specifies the track number to play. |
|
|
-a <sec> --start <sec> |
Point to start playback, in seconds from the beginning of the media segment. |
|
|
-d <sec> --duration <sec> |
Duration of playback, in seconds. |
|
| --no-sync | Disable AV sync. |
|
| --disable-dpms |
Unconditionally disable DPMS/ScreenBlanking during operation; re-enable on exit. |
|
| --stealth |
Operate in stealth mode, staying alive even when no media is playing. |
|
| --bg | Operate in background mode, ignoring keyboard input. |
|
| --use-playbin | Use Playbin GStreamer element. |
|
| --no-audio | Disable audio. |
|
| --no-video | Disable video. |
|
| --disable-anative | Disable native audio rendering. |
|
| --disable-vnative | Disable native video rendering. |
|
| --use-buffering |
Enable decodebin property for emitting |
|
|
-l <pct> --low-percent <pct> |
Low threshold for buffering to start, in pct. |
|
|
-j <pct> --high-percent <pct> |
High threshold for buffering to finish, in percent. |
|
| --loop-forever | Play the URI(s) in an endless loop. |
|
|
-t <sec> --max-size-time <sec> |
Maximum time in queue, in seconds (0=automatic). |
|
|
-y <n> --max-size-bytes <n> |
Maximum amount of memory in the queue, in bytes (0=automatic). |
|
|
-b <n> --max-size-buffers <n> |
Maximum number of buffers in the queue (0=automatic). |
|
| --window-x <n> | X coordinate for player window (for non-overlay rendering). |
|
| --window-y <n> | Y coordinate for player window (for non-overlay rendering). |
|
| --window-width <n> | Window width (for non-overlay rendering). |
|
| --window-height <n> | Window height (for non-overlay rendering). |
|
| --disable-fullscreen | Play video in non-full-screen mode (for nveglglessink). |
|
|
-k <sec> --image-display-time <sec> |
Image display time, in seconds. |
|
| --show-tags | Shows tags (metadata), if available. |
|
| --stats | Shows stream statistics, if enabled. |
|
| --stats-file | File to dump stream statistics, if enabled. |
|
| --svd=<chain> | Chain to use for video decoding. |
Where <chain> is as described below. |
| --sad=<chain> | Chain to use for audio decoding. |
|
| --svc=<chain> | Chain to use for video postprocessing. |
|
| --sac=<chain> | Chain to use for audio postprocessing. |
|
| --svs=<chain> | Chain to use for video rendering. |
|
| --sas=<chain> | Chain to use for audio rendering. |
|
| --shttp=<chain> | Chain to use for HTTP source. |
|
| --srtsp=<chain> | Chain to use for RTSP source. |
|
| --sudp=<chain> | Chain to use for UDP source. |
|
| --sfsrc=<chain> | Chain to use for file source. |
|
|
Examples: |
||
nvgstplayer-1.0 Runtime Commands#
This table describes nvgstplayer runtime commands.
nvgstplayer-1.0 runtime commands |
|
|---|---|
| Option | Description and examples |
| h | Help. |
| q | Quit. |
|
Up arrow ] |
Go to next track. |
| c | Restart current track. |
|
Down arrow [ |
Go to previous track. |
| spos | Query for position (time from start). |
| sdur | Query for duration. |
| s<sec> |
Seek to Example: |
| v<pct> |
Seek to Example: |
| f<sec> |
Shift Example: |
|
Left arrow < |
Seek backward 10 seconds. |
|
Right arrow > |
Seek forward 10 seconds. |
| p | Pause playback. |
| r | Start/resume playback. |
| z | Stop playback. |
| i:<uri> | Enter a single URI. |
Video Encoder Features#
The respective GStreamer-1.0-based gst-v4l2 video encoders support the following features:
gst-v4l2 video encoder features |
||||
|---|---|---|---|---|
| Feature | H264enc | H265enc | AV1enc | |
| profile (Baseline / Main / High) | ✓ (all) | ✓ (main) | — | |
| control-rate | ✓ | ✓ | ✓ | |
| bitrate | ✓ | ✓ | ✓ | |
| insert-spsppsatidr | ✓ | ✓ | — | |
| profile | ✓ | ✓ | — | |
| quantization range for I, P, and B frame | ✓ | ✓ | — | |
| iframeinterval | ✓ | ✓ | ✓ | |
| qp-range | ✓ | ✓ | ✓ | |
| bit-packetization | ✓ | ✓ | — | |
| preset-level | ✓ | ✓ | ✓ | |
| slice-header spacing | ✓ | ✓ | — | |
| force-IDR | ✓ | ✓ | ✓ | |
| enable TwoPassCBR | ✓ | ✓ | — | |
| enable CABAC-entropy-coding | ✓ | — | — | |
| enable MVBufferMeta | ✓ | ✓ | — | |
| insert aud | ✓ | ✓ | — | |
| insert vui | ✓ | ✓ | — | |
| num-B-Frames | ✓ | ✓ | — | |
| picture order count type | ✓ | — | — | |
Supported Cameras#
This section describes the supported cameras.
COE Cameras#
Jetson AGX Thor series can capture camera images using the CoE interface.
Eagle Image Sensor VB1940
CSI Cameras#
Jetson AGX Orin series can capture camera images using the CSI interface.
- Jetson AGX Orin series supports RAW Bayer capture data.
GStreamer supports simultaneous capture from multiple CSI cameras. Support is validated using the
nvgstcaptureapplication.- Capture is validated for SDR modes for various sensors using the
nvgstcaptureapplication.
- Capture is validated for SDR modes for various sensors using the
- Jetson AGX Orin series also support the MIPI CSI virtual channel feature. The virtual channel is a unique channel identifier that is used for multiplexed sensor streams that share the same CSI port/brick and CSI stream through supported Gigabit Multimedia Serial Link (GMSL)aggregators.
USB 2.0 Cameras#
The following camera has been validated on Jetson platforms running Jetson Linux with USB 2.0 ports. This camera is UVC compliant.
Industrial Camera Details#
The following USB 3.0 industrial camera is validated on Jetson AGX Orin and Thor series under Jetson Linux:
Characteristics of this camera are:
USB 3.0
UVC compliant
3840×2160 at 30 FPS; 4224×3156 at 13 FPS
Purpose—embedded navigation
Test using the nvgstcapture app.
Issues encountered:
FPS cannot be fixed. Changes based on exposure.
FPS cannot be changed. Needs payment to vendor to get the support added to their firmware.
IPC Plugins#
The GStreamer IPC plugins enable the division of a GStreamer pipeline into multiple processes. These plugins provide the necessary elements to interconnect GStreamer pipelines running in different processes.
Name |
Description |
|---|---|
nvipcpipelinesink |
IPC sink element derived from OSS ipcpipelinesink element |
nvipcpipelinesrc |
IPC source element derived from OSS ipcpipelinesrc element |
nvipcslavepipeline |
IPC slave pipeline element derived from OSS ipcslavepipeline element |
nvunixfdsink |
Unix file descriptor sink derived from OSS unixfdsink element |
nvunixfdsrc |
Unix file descriptor source derived from OSS unixfdsrc element |
Note
The nvunixfdsink and nvunixfdsrc plugins are recommended and supported for IPC. The nvipcpipelinesink, nvipcpipelinesrc, and nvipcslavepipeline plugins are deprecated.
Decoder IPC Functionality#
In most cases, decoding operations are carried out within a single process that may involve multiple threads to achieve parallel processing on a Linux host system. However, specific situations necessitate cross-process decoding. This approach is particularly useful when multiple processes on the same device need to use separate hardware video decoder instances to decode live streams. To optimize hardware video decoder utilization on the device, decoded buffers of live streams must be shared across multiple processes.
The diagram below shows the GStreamer pipeline for the decoder IPC use-case.
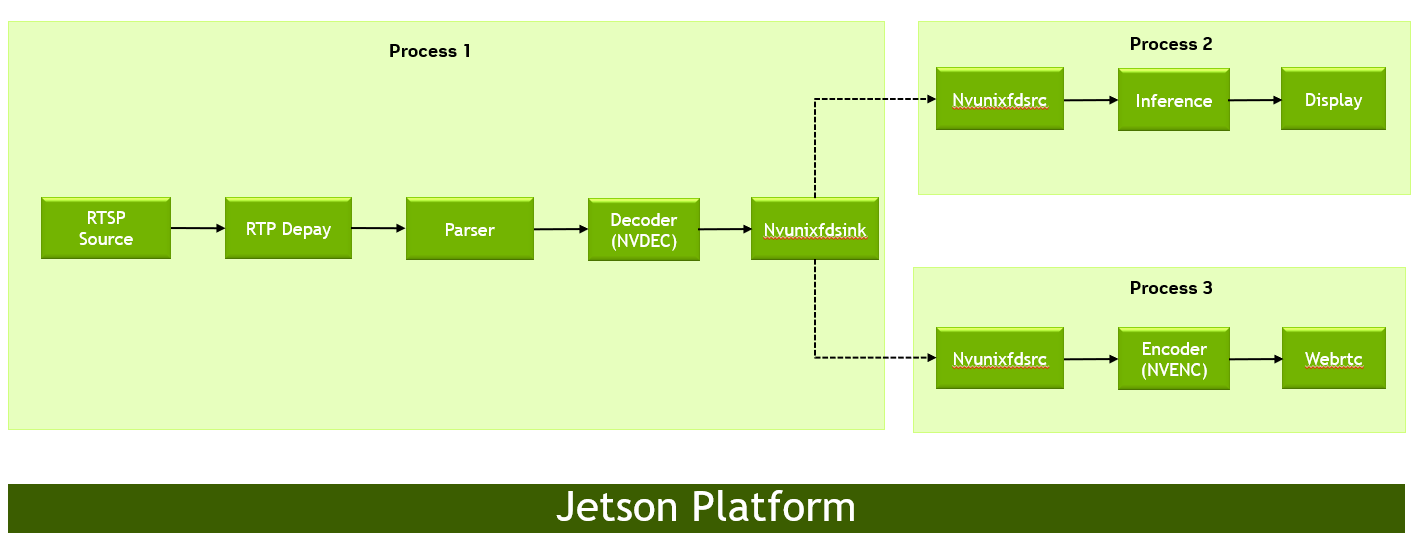
The GStreamer pipeline splits into multiple processes using nvunixfdsink, which serves as the sink for the first pipeline, and nvunixfdsrc, which serves as the source for the
second pipeline. These two components are connected using a Unix socket, allowing buffers to be transferred between the pipelines.
GStreamer Commands#
Server:
$ gst-launch-1.0 uridecodebin uri=<rtsp_url> ! queue ! \ nvunixfdsink socket-path=/tmp/test1 sync=false -vClient:
$ gst-launch-1.0 nvunixfdsrc socket-path=/tmp/test1 ! \ 'video/x-raw(memory:NVMM), format=NV12' ! \ queue ! nv3dsink sync=false -v
nvgstipctestapp Reference#
This section describes the operation of the the nvgstipctestapp sample application. nvgstipctestapp is developed to demonstrate decoder IPC functionality, operating as
either a server or client depending on the command line arguments provided.
Command-Line Options#
The following describes nvgstipctestapp command-line options:
nvgstipctestapp server <RTSP_URL> <socket_path>
For example:
$ export DISPLAY=:0 $ nvgstipctestapp server rtsp://127.0.0.1/video1 /tmp/test1
nvgstipctestapp client <socket_path>
For example:
$ export DISPLAY=:0 $ nvgstipctestapp client /tmp/test1
Server-Client Communication#
The server accepts an H.264/H.265 video stream RTSP URL and an IPC socket path as input. It listens for connections on the specified IPC socket path. After accepting the connection request, the server sends the dmabuf fd
of the decoded data over a Unix socket to all connected clients. When the server receives acknowledgment from all connected decoder clients, it reuses the decoded buffer for decoding another buffer.
On the other hand, the client can only accept the IPC socket path as input. It sends a connection request to the server, which, upon accepting the request, starts receiving the dmabuf fd
of the decoded data over the Unix socket. The client then pushes it further into the pipeline. To complete the process, the client sends an acknowledgment to the server immediately after the decoded buffer is used.