ControlNet#
Model Introduction#
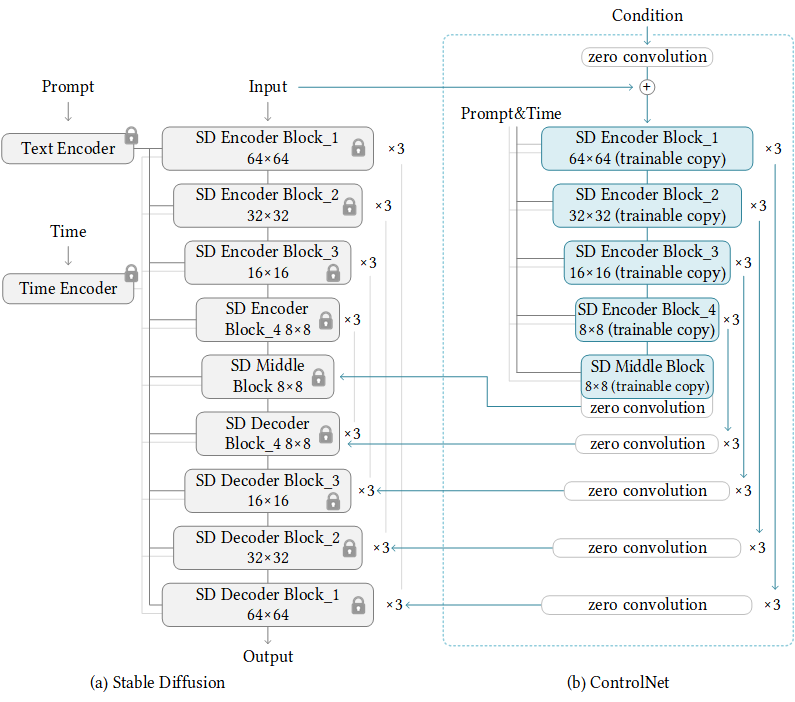
ControlNet [MM-MODELS-CN1] is a neural network structure to control diffusion models by adding extra conditions. It copies the weights of neural network blocks into a “locked” copy and a “trainable” copy. The “trainable” one learns your condition. The “locked” one preserves your model. In this way, the ControlNet can reuse the SD encoder as a deep, strong, robust, and powerful backbone to learn diverse controls. NeMo Multimodal provides a training pipeline and example implementation for generating images based on segmentation maps. Users have the flexibility to explore other implementations using their own control input dataset and recipe.
ControlNet Dataset#
ControlNet employs the WebDataset format for data ingestion. (See Datasets) Beyond the essential image-text pairs saved in tarfiles with matching names but distinct extensions (like 000001.jpg and 000001.txt), ControlNet also requires control input within the tarfiles, identifiable by their specific extension. By default, the control input should be stored as 000001.png for correct loading and identification in NeMo’s implementation.
Model Configuration#
Even though the original copy of Stable Diffusion weights is locked, proper configuration settings toghether with a compatible pre-trained checkpoint are required for initialization. See Model Configuration for more details about unet_config, first_stage_config and cond_stage_config.
Contol Stage Config#
control_stage_config:
_target_: nemo.collections.multimodal.models.controlnet.controlnet.ControlNet
params:
from_pretrained_unet: /ckpts/v1-5-pruned.ckpt
from_NeMo: False
image_size: 32 # unused
in_channels: 4
hint_channels: 3
model_channels: 320
attention_resolutions: [ 4, 2, 1 ]
num_res_blocks: 2
channel_mult: [ 1, 2, 4, 4 ]
num_heads: 8
use_spatial_transformer: True
use_linear_in_transformer: False
transformer_depth: 1
context_dim: 768
use_checkpoint: False
legacy: False
use_flash_attention: True
from_pretrained_unet: Same logic asunet_config.from_pretrained, adjust the from_NeMo based on the checkpoint’s source, whether it’s from Huggingface or NeMo.control_stage_config: Outlines the architecture for the trainable copy of U-Net. It’s essential that all parameters align with the U-Net checkpoint specified in this section.hint_channels: Represents the channels of input controls, which is 3 in the mentioned example due to the RGB image input having a shape of (H, W, 3).
ControlNet Training Options#
model:
control_key: hint
only_mid_control: False
sd_locked: True
...
contorl_key: Identifier of the control input,.pngfiles will be converted to dictionary for dataloaders with their keys beinghint.only_mid_control: When set to True, during training, only the output from the middle block of the trainable copy will be incorporated into the locked copy.sd_locked: Whether to lock the original stable diffusion weights during training.
Reference#
Zhang Lllyasviel. Lllyasviel/controlnet. 2023. URL: lllyasviel/ControlNet.