Dynamic Mode
Optical Flow#
This notebook presents how to use DALI to calculate optical flow for a given sequence of frames.
Let’s start with some handy imports
[1]:
import os
from pathlib import Path
import numpy as np
import nvidia.dali.experimental.dynamic as ndd
from matplotlib import pyplot as plt
DALI_EXTRA_PATH environment variable should point to the place where data from DALI extra repository is downloaded. Please make sure that the proper release tag is checked out.
[2]:
sequence_length = 10
dali_extra_dir = Path(os.environ["DALI_EXTRA_PATH"])
video_filename = str(
dali_extra_dir
/ "db"
/ "optical_flow"
/ "sintel_trailer"
/ "sintel_trailer_short.mp4"
)
[3]:
def make_colorwheel():
"""
Generates a color wheel for optical flow visualization as presented in:
Baker et al. "A Database and Evaluation Methodology for Optical Flow"
(ICCV, 2007)
URL: http://vision.middlebury.edu/flow/flowEval-iccv07.pdf
According to the C++ source code of Daniel Scharstein
According to the Matlab source code of Deqing Sun
"""
RY = 15
YG = 6
GC = 4
CB = 11
BM = 13
MR = 6
ncols = RY + YG + GC + CB + BM + MR
colorwheel = np.zeros((ncols, 3))
col = 0
# RY
colorwheel[0:RY, 0] = 255
colorwheel[0:RY, 1] = np.floor(255 * np.arange(0, RY) / RY)
col = col + RY
# YG
colorwheel[col : col + YG, 0] = 255 - np.floor(255 * np.arange(0, YG) / YG)
colorwheel[col : col + YG, 1] = 255
col = col + YG
# GC
colorwheel[col : col + GC, 1] = 255
colorwheel[col : col + GC, 2] = np.floor(255 * np.arange(0, GC) / GC)
col = col + GC
# CB
colorwheel[col : col + CB, 1] = 255 - np.floor(255 * np.arange(CB) / CB)
colorwheel[col : col + CB, 2] = 255
col = col + CB
# BM
colorwheel[col : col + BM, 2] = 255
colorwheel[col : col + BM, 0] = np.floor(255 * np.arange(0, BM) / BM)
col = col + BM
# MR
colorwheel[col : col + MR, 2] = 255 - np.floor(255 * np.arange(MR) / MR)
colorwheel[col : col + MR, 0] = 255
return colorwheel
def flow_compute_color(u, v, convert_to_bgr=False):
"""
Applies the flow color wheel to (possibly clipped) flow components u and v.
According to the C++ source code of Daniel Scharstein
According to the Matlab source code of Deqing Sun
:param u: np.ndarray, input horizontal flow
:param v: np.ndarray, input vertical flow
:param convert_to_bgr: bool, whether to change ordering and output BGR
instead of RGB
:return:
"""
flow_image = np.zeros((u.shape[0], u.shape[1], 3), np.uint8)
colorwheel = make_colorwheel() # shape [55x3]
ncols = colorwheel.shape[0]
rad = np.sqrt(np.square(u) + np.square(v))
a = np.arctan2(-v, -u) / np.pi
fk = (a + 1) / 2 * (ncols - 1)
k0 = np.floor(fk).astype(np.int32)
k1 = k0 + 1
k1[k1 == ncols] = 0
f = fk - k0
for i in range(colorwheel.shape[1]):
tmp = colorwheel[:, i]
col0 = tmp[k0] / 255.0
col1 = tmp[k1] / 255.0
col = (1 - f) * col0 + f * col1
idx = rad <= 1
col[idx] = 1 - rad[idx] * (1 - col[idx])
col[~idx] = col[~idx] * 0.75 # out of range?
# Note the 2-i => BGR instead of RGB
ch_idx = 2 - i if convert_to_bgr else i
flow_image[:, :, ch_idx] = np.floor(255 * col)
return flow_image
def flow_to_color(flow_uv, clip_flow=None, convert_to_bgr=False):
"""
Expects a two dimensional flow image of shape [H,W,2]
According to the C++ source code of Daniel Scharstein
According to the Matlab source code of Deqing Sun
:param flow_uv: np.ndarray of shape [H,W,2]
:param clip_flow: float, maximum clipping value for flow
:return:
"""
assert flow_uv.ndim == 3, "input flow must have three dimensions"
assert flow_uv.shape[2] == 2, "input flow must have shape [H,W,2]"
if clip_flow is not None:
flow_uv = np.clip(flow_uv, 0, clip_flow)
u = flow_uv[:, :, 0]
v = flow_uv[:, :, 1]
rad = np.sqrt(np.square(u) + np.square(v))
rad_max = np.max(rad)
epsilon = 1e-5
u = u / (rad_max + epsilon)
v = v / (rad_max + epsilon)
return flow_compute_color(u, v, convert_to_bgr)
Using DALI#
We create a video reader and call optical_flow on the video tensor to compute the optical flow.
For more information, please refer to readers.Video and optical_flow documentation.
[4]:
reader = ndd.readers.Video(
device="gpu",
filenames=video_filename,
sequence_length=sequence_length,
file_list_include_preceding_frame=True,
)
video = reader()
of = ndd.optical_flow(video, output_grid=4)
of = of.cpu()
print(of.shape)
(9, 180, 320, 2)
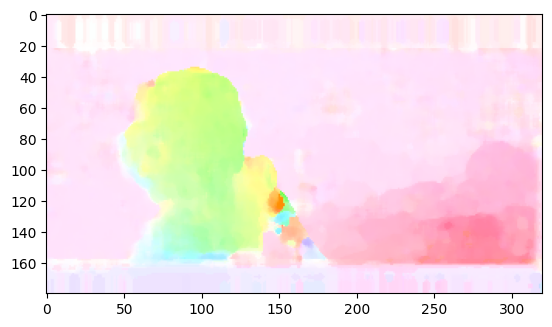
Above you can see the shape of the calculated optical flow (in FHWC format). It contains 2 channels: flow vector in x axis and flow vector in y axis. Output resolution is determined by output_grid option passed to optical_flow operator: for output_grid = 4, 4x4 grid is used for flow calculation, thus resolution in every dimension being 4 times smaller than the resolution of the input image.
Visualize Results#
[5]:
of_result = flow_to_color(of[sequence_length // 2])
plt.imshow(of_result)
[5]:
<matplotlib.image.AxesImage at 0x7a48b470c670>