DALI Torchvision API#
Starting from DALI 2.1 a Torchvision-compatible API is available under the experimental namespace. It provides GPU-accelerated drop-in replacements for torchvision.transforms.v2 operators, letting you keep existing Torchvision-style code while transparently offloading work to DALI pipelines.
Two complementary APIs are provided:
Style |
Import |
Usage |
|---|---|---|
Object-oriented |
|
Stateful operator objects chained via |
Functional |
|
Stateless functions, one call per operation |
Setup#
Import both the object-oriented API (aliased dtv) and the functional API (aliased dtv_fn), alongside the standard Torchvision counterparts for comparison.
[1]:
import torch
import torchvision.transforms.v2 as tv
import torchvision.transforms.v2.functional as tv_fn
from PIL import Image
import numpy as np
# DALI Torchvision API — object-oriented
import nvidia.dali.experimental.torchvision as dtv
# DALI Torchvision API — functional
import nvidia.dali.experimental.torchvision.v2.functional as dtv_fn
print("DALI operators available:", dtv.__all__)
print("DALI functional ops available:", dtv_fn.__all__)
DALI operators available: ['CenterCrop', 'ColorJitter', 'Compose', 'GaussianBlur', 'Grayscale', 'Normalize', 'Pad', 'PILToTensor', 'RandomApply', 'RandomCrop', 'RandomGrayscale', 'RandomHorizontalFlip', 'RandomResizedCrop', 'RandomVerticalFlip', 'Resize', 'ToPILImage', 'ToPureTensor']
DALI functional ops available: ['center_crop', 'crop', 'gaussian_blur', 'get_dimensions', 'get_image_size', 'get_size', 'horizontal_flip', 'normalize', 'pad', 'pil_to_tensor', 'resize', 'resized_crop', 'rgb_to_grayscale', 'to_grayscale', 'to_pil_image', 'to_tensor', 'vertical_flip']
Supported operators#
The DALI Torchvision-compatible API exports a curated subset of torchvision.transforms.v2. The tables below list every operator currently available in each API style, its torchvision.transforms.v2 counterpart (linked to the official Torchvision docs), and a short description. All names listed are part of the public __all__ of their respective module.
Object-oriented operators#
Available under nvidia.dali.experimental.torchvision (aliased dtv in this notebook).
DALI name |
Torchvision counterpart |
Description |
|---|---|---|
|
|
Crops a fixed-size region from the image centre. |
|
|
Randomly perturbs brightness, contrast, saturation, and hue. |
|
|
Chains a list of operators into a single callable DALI pipeline. |
|
|
Applies a Gaussian blur with configurable kernel size and sigma. |
|
|
Converts the image to grayscale, optionally keeping three channels. |
|
|
Subtracts a per-channel mean and divides by a per-channel standard deviation. |
|
|
Pads the image borders with the chosen padding mode ( |
|
|
Marker placed at the end of a Compose op list — signals the HWC pipeline to return a uint8 CHW torch.Tensor (values in [0, 255], no scaling) instead of PIL.Image. The conversion is performed by Compose. The operator does not modify the data. |
|
|
Randomly applies a sequence of operators with a given probability. |
|
|
Crops a random region with the requested size. |
|
|
Randomly converts the image to grayscale with a given probability. |
|
|
Horizontally flips the image with a given probability. |
|
|
Crops a random region and resizes it to the requested size. |
|
|
Vertically flips the image with a given probability. |
|
|
Resizes the image to the requested size or shortest-side length. |
|
|
Acts as a return-type hint for |
|
|
Marker placed in a Compose op list — signals the pipeline to return a plain torch.Tensor regardless of the pipeline’s default output type. Does not modify the data. |
Functional operators#
Available under nvidia.dali.experimental.torchvision.v2.functional (aliased dtv_fn).
DALI name |
Torchvision counterpart |
Description |
|---|---|---|
|
|
Crops a fixed-size region from the image centre. |
|
|
Crops the image at a specified top-left coordinate and size. |
|
|
Applies a Gaussian blur with configurable kernel size and sigma. |
|
|
Returns the number of channels, height, and width of an image. |
|
|
Returns the spatial size as |
|
|
Returns the spatial size as |
|
|
Flips the image horizontally (always applied). |
|
|
Subtracts a per-channel mean and divides by a per-channel standard deviation. |
|
|
Pads the image borders with the chosen padding mode. |
|
|
Converts a |
|
|
Resizes the image to the requested size or shortest-side length. |
|
|
Crops a region and resizes it to the requested size. |
|
|
Converts a 3-channel RGB image to grayscale. |
|
|
Converts the image to grayscale, optionally keeping three channels. |
|
|
Converts a CHW |
|
|
Converts a |
|
|
Flips the image vertically (always applied). |
Sample data#
We create a small synthetic RGB PIL.Image and a matching torch.Tensor (CHW layout) to illustrate both input modes.
[2]:
# 64x64 RGB image with a simple colour gradient
H, W = 64, 64
arr = np.zeros((H, W, 3), dtype=np.uint8)
arr[:, :, 0] = np.linspace(0, 255, W, dtype=np.uint8) # red gradient
arr[:, :, 1] = np.linspace(0, 255, H, dtype=np.uint8)[:, None] # green gradient
arr[:, :, 2] = 128 # constant blue
pil_img = Image.fromarray(arr, mode="RGB")
print("PIL image:", pil_img.size, pil_img.mode)
# torch.Tensor in CHW format (as produced by torchvision.transforms.v2.ToImage)
tensor_img = (
tv_fn.pil_to_tensor(pil_img).contiguous().float()
) # shape: (3, 64, 64)
print("torch.Tensor shape:", tensor_img.shape)
PIL image: (64, 64) RGB
torch.Tensor shape: torch.Size([3, 64, 64])
Visual Pipeline Example#
Loading real images from disk and applying a DALI Torchvision pipeline to visualise the transformations side-by-side.
[3]:
import os
import matplotlib.gridspec as gridspec
import matplotlib.pyplot as plt
from PIL import Image
%matplotlib inline
IMAGE_DIR = "../data/images"
def collect_images(image_dir: str, n: int = 8):
"""Return up to *n* PIL images found recursively under *image_dir*."""
paths = []
for root, _, files in os.walk(image_dir):
for fname in sorted(files):
if fname.lower().endswith((".jpg", ".jpeg", ".png")):
paths.append(os.path.join(root, fname))
return [Image.open(p).convert("RGB") for p in paths[:n]]
def show_pil_images(images, title: str = "", columns: int = 4):
"""Display a list of PIL images in a grid."""
n = len(images)
rows = (n + columns - 1) // columns
fig = plt.figure(figsize=(16, (16 // columns) * rows))
if title:
fig.suptitle(title, fontsize=14, y=1.02)
gs = gridspec.GridSpec(rows, columns)
for j in range(rows * columns):
ax = plt.subplot(gs[j])
ax.axis("off")
if j < n:
ax.imshow(images[j])
plt.tight_layout()
plt.show()
original_images = collect_images(IMAGE_DIR, n=8)
print(f"Loaded {len(original_images)} images")
print("Sizes:", [img.size for img in original_images])
Loaded 8 images
Sizes: [(640, 480), (640, 480), (640, 597), (640, 425), (640, 427), (640, 427), (640, 427), (640, 446)]
Original images#
[4]:
show_pil_images(original_images, title="Original images")
Augmentation pipeline#
Apply a sequence of operators that resize, randomly flip, convert to grayscale, and add padding — the same operators you would use with torchvision.transforms.v2.Compose.
[5]:
augment = dtv.Compose(
[
dtv.Resize(size=(128, 128)),
dtv.RandomHorizontalFlip(p=0.5),
dtv.ColorJitter(brightness=0.4, contrast=0.4, saturation=0.4),
dtv.Pad(padding=8, padding_mode="reflect"),
]
)
augmented_images = [augment(img) for img in original_images]
print(f"Augmented {len(augmented_images)} images")
print("Output sizes:", [img.size for img in augmented_images])
Augmented 8 images
Output sizes: [(144, 144), (144, 144), (144, 144), (144, 144), (144, 144), (144, 144), (144, 144), (144, 144)]
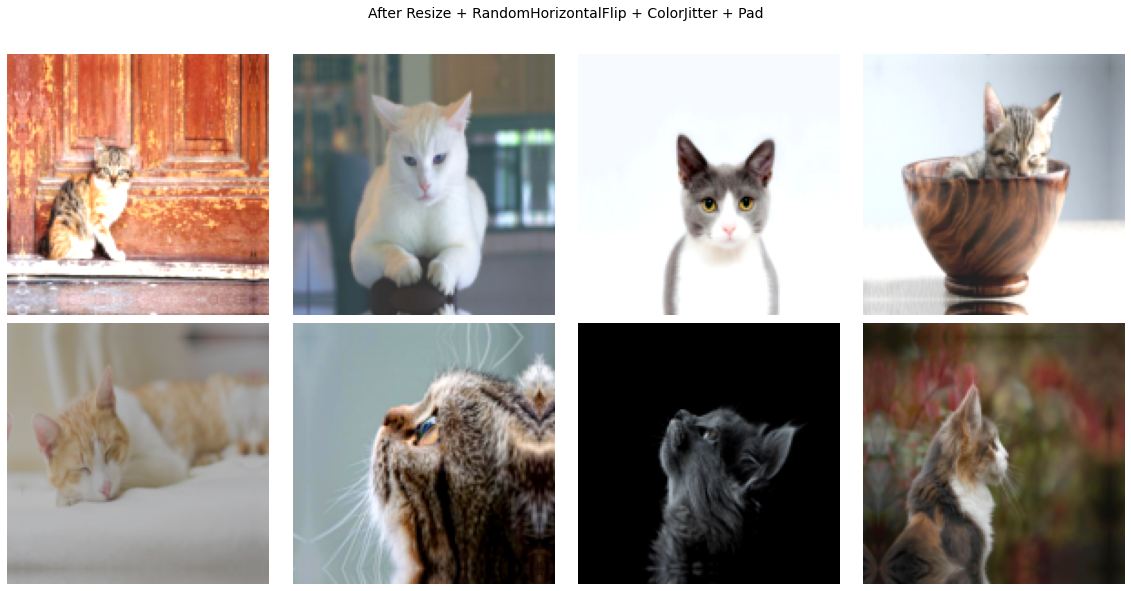
Augmented images#
[6]:
show_pil_images(
augmented_images,
title="After Resize + RandomHorizontalFlip + ColorJitter + Pad",
)
Object-oriented API#
The class-based API mirrors torchvision.transforms.v2: instantiate an operator and call it. Due to DALI’s pipeline design, operators must be wrapped inside ``dtv.Compose`` — the Compose object builds and owns the underlying DALI pipeline.
pipeline = dtv.Compose(
[
dtv.Resize(size=(128, 128)),
dtv.RandomHorizontalFlip(p=0.5),
...
]
)
output = pipeline(img)
Compose detects the input type automatically:
PIL.Image→ uses an HWC pipeline, returnsPIL.Imagetorch.Tensor(CHW) → uses a CHW pipeline, returnstorch.Tensor
PIL Image input#
[7]:
# Build a DALI pipeline that resizes and pads
pipeline_pil = dtv.Compose(
[
dtv.Resize(size=(32, 32)),
dtv.Pad(padding=4, padding_mode="reflect"),
]
)
out_dali = pipeline_pil(pil_img)
print("DALI output type:", type(out_dali), "size:", out_dali.size)
# Equivalent Torchvision pipeline for comparison
pipeline_tv = tv.Compose(
[
tv.Resize(size=(32, 32)),
tv.Pad(padding=4, padding_mode="reflect"),
]
)
out_tv = pipeline_tv(pil_img)
print("TV output type:", type(out_tv), "size:", out_tv.size)
# Verify pixel-level equality — cast to float since torch.allclose requires floating-point tensors
dali_t = tv_fn.pil_to_tensor(out_dali).float()
tv_t = tv_fn.pil_to_tensor(out_tv).float()
print("Outputs are equal:", torch.allclose(dali_t, tv_t, rtol=0, atol=1))
DALI output type: <class 'PIL.Image.Image'> size: (40, 40)
TV output type: <class 'PIL.Image.Image'> size: (40, 40)
Outputs are equal: True
torch.Tensor input#
Pass a CHW torch.Tensor directly — Compose will use the CHW pipeline automatically and return a torch.Tensor of the same shape convention.
[8]:
pipeline_tensor = dtv.Compose(
[
dtv.CenterCrop(size=(48, 48)),
dtv.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
]
)
# Normalize expects float input in [0, 1] range; scale from [0, 255]
tensor_img_01 = tensor_img / 255.0
out_dali_t = pipeline_tensor(tensor_img_01)
print("DALI output shape:", out_dali_t.shape, "dtype:", out_dali_t.dtype)
pipeline_tv_t = tv.Compose(
[
tv.CenterCrop(size=(48, 48)),
tv.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
]
)
out_tv_t = pipeline_tv_t(tensor_img_01)
print("TV output shape:", out_tv_t.shape, "dtype:", out_tv_t.dtype)
print("Max absolute diff:", (out_dali_t - out_tv_t).abs().max().item())
DALI output shape: torch.Size([3, 48, 48]) dtype: torch.float32
TV output shape: torch.Size([3, 48, 48]) dtype: torch.float32
Max absolute diff: 1.1920928955078125e-07
Functional API#
The functional API (dtv_fn) exposes stateless functions — the same operations without needing operator objects or a Compose wrapper. The call signature intentionally mirrors torchvision.transforms.v2.functional.
import nvidia.dali.experimental.torchvision.v2.functional as dtv_fn
output = dtv_fn.resize(img, size=(224, 224))
Both PIL.Image and torch.Tensor (CHW) inputs are supported for most functions.
[9]:
# Functional API on a PIL Image
resized_pil = dtv_fn.resize(pil_img, size=[32, 32])
flipped_pil = dtv_fn.horizontal_flip(pil_img)
gray_pil = dtv_fn.to_grayscale(pil_img)
padded_pil = dtv_fn.pad(pil_img, padding=8, padding_mode="edge")
cropped_pil = dtv_fn.center_crop(pil_img, output_size=(48, 48))
print("resize :", resized_pil.size)
print("hflip :", flipped_pil.size)
print("grayscale :", gray_pil.size, gray_pil.mode)
print("pad (edge, 8):", padded_pil.size)
print("center_crop :", cropped_pil.size)
resize : (32, 32)
hflip : (64, 64)
grayscale : (64, 64) L
pad (edge, 8): (80, 80)
center_crop : (48, 48)
[10]:
# Functional API on a torch.Tensor (CHW, float32)
# Scale tensor_img to [0, 1] dynamic range before processing
scaled_tensor_img = tensor_img / tensor_img.max()
resized_t = dtv_fn.resize(scaled_tensor_img, size=[32, 32])
flipped_t = dtv_fn.horizontal_flip(scaled_tensor_img)
norm_t = dtv_fn.normalize(
scaled_tensor_img, mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]
)
blurred_t = dtv_fn.gaussian_blur(scaled_tensor_img, kernel_size=5, sigma=1.0)
print("resize :", resized_t.shape)
print("hflip :", flipped_t.shape)
print("normalize :", norm_t.shape, "mean:", norm_t.mean().item())
print("gaussian_blur:", blurred_t.shape)
resize : torch.Size([3, 32, 32])
hflip : torch.Size([3, 64, 64])
normalize : torch.Size([3, 64, 64]) mean: 0.22406327724456787
gaussian_blur: torch.Size([3, 64, 64])
DALI Extensions#
The DALI implementation extends the original Torchvision API with two additional parameters that provide fine-grained control over pipeline execution:
Parameter |
Scope |
Default |
Description |
|---|---|---|---|
|
Each operator |
|
Target execution device: |
|
|
|
Maximum number of samples processed per pipeline call |
Note: Mixing
devicetypes across operators inside a singleComposeis not currently supported. All operators must target the same device.Note: When
batch_size > 1, the input toComposemust be atorch.Tensorwith a leading batch dimension(N, C, H, W).
GPU pipeline#
Pass device="gpu" to each operator to run the pipeline on the GPU. The output tensor resides on the GPU; call .cpu() to move it back if needed. It is important to align input data location and operator execution device — if they differ, an automatic copy is performed with a warning.
[11]:
if torch.cuda.is_available():
pipeline_gpu = dtv.Compose(
[
dtv.Resize(size=(32, 32), device="gpu"),
dtv.Pad(padding=4, padding_mode="reflect", device="gpu"),
]
)
# Input tensor on GPU
tensor_gpu = tensor_img.cuda()
out_gpu = pipeline_gpu(tensor_gpu)
print("Output device:", out_gpu.device)
print("Output shape :", out_gpu.shape)
# Compare to CPU reference
pipeline_cpu = dtv.Compose(
[
dtv.Resize(size=(32, 32), device="cpu"),
dtv.Pad(padding=4, padding_mode="reflect", device="cpu"),
]
)
out_cpu = pipeline_cpu(tensor_img)
print(
"Max absolute diff (cpu vs gpu):",
(out_cpu - out_gpu.cpu()).abs().max().item(),
)
else:
print("CUDA not available — skipping GPU example.")
Output device: cuda:0
Output shape : torch.Size([3, 40, 40])
Max absolute diff (cpu vs gpu): 0.0
GPU functional API#
The functional API also accepts a device parameter.
[12]:
if torch.cuda.is_available():
tensor_gpu = tensor_img.cuda()
resized_gpu = dtv_fn.resize(tensor_gpu, size=[32, 32], device="gpu")
flipped_gpu = dtv_fn.horizontal_flip(tensor_gpu, device="gpu")
print("resize (gpu):", resized_gpu.shape, resized_gpu.device)
print("hflip (gpu):", flipped_gpu.shape, flipped_gpu.device)
else:
print("CUDA not available — skipping GPU functional example.")
resize (gpu): torch.Size([3, 32, 32]) cuda:0
hflip (gpu): torch.Size([3, 64, 64]) cuda:0
Batch processing#
Set batch_size on Compose to process multiple samples in a single pipeline run. The input must be a 4-D torch.Tensor of shape (N, C, H, W) where N ≤ batch_size.
[13]:
BATCH = 4
# Create a batch of N=4 images (NCHW)
batch = tensor_img.unsqueeze(0).repeat(BATCH, 1, 1, 1) # (4, 3, 64, 64)
print("Input batch shape:", batch.shape)
pipeline_batch = dtv.Compose(
[
dtv.Resize(size=(32, 32)),
dtv.RandomHorizontalFlip(p=0.5),
],
batch_size=BATCH,
)
out_batch = pipeline_batch(batch)
print("Output batch shape:", out_batch.shape) # (4, 3, 32, 32)
Input batch shape: torch.Size([4, 3, 64, 64])
Output batch shape: torch.Size([4, 3, 32, 32])
Complete pipeline example#
A pre-processing pipeline using the DALI API, following the standard ResNet pre-processing steps — structurally identical to the Torchvision version but executed by DALI.
[14]:
IMAGENET_MEAN = [0.485, 0.456, 0.406]
IMAGENET_STD = [0.229, 0.224, 0.225]
# --- DALI pipeline ---
dali_preprocess = dtv.Compose(
[
dtv.Resize(size=256),
dtv.CenterCrop(size=(224, 224)),
dtv.Normalize(mean=IMAGENET_MEAN, std=IMAGENET_STD),
]
)
# --- Equivalent Torchvision pipeline ---
tv_preprocess = tv.Compose(
[
tv.Resize(size=256),
tv.CenterCrop(size=(224, 224)),
tv.Normalize(mean=IMAGENET_MEAN, std=IMAGENET_STD),
]
)
# Use a larger synthetic image to make the resize step meaningful.
# Scale to [0, 1] — ImageNet mean/std constants assume this range.
large_arr = np.random.randint(0, 256, (3, 480, 640), dtype=np.uint8)
large_tensor = (
torch.from_numpy(large_arr).float() / 255.0
) # (3, 480, 640), values in [0, 1]
out_dali = dali_preprocess(large_tensor)
out_tv = tv_preprocess(large_tensor)
print("DALI output shape:", out_dali.shape)
print("TV output shape:", out_tv.shape)
print("Max absolute diff:", (out_dali - out_tv).abs().max().item())
DALI output shape: torch.Size([3, 224, 224])
TV output shape: torch.Size([3, 224, 224])
Max absolute diff: 4.606693983078003e-05