Additional Configuration#
Reference for configurable values in deploy_nemoclaw_vss.ipynb and the optional notebook cells that go beyond the minimum Setup VSS and Skills path.
Brev hardware and CSP selection#
The default Brev launchable is available for the notebook path. Before launching the instance, you can also edit the launchable to choose a different hardware profile, such as GPU or CPU shape, and cloud service provider (CSP).
Click Edit in the upper right corner of the Brev launchable before creating the instance.#
In the Brev launchable editor, select the hardware profile and CSP that match your deployment target and available capacity, then launch the instance. Review Hardware Requirements and Development Profile GPU Requirements before selecting the hardware profile.
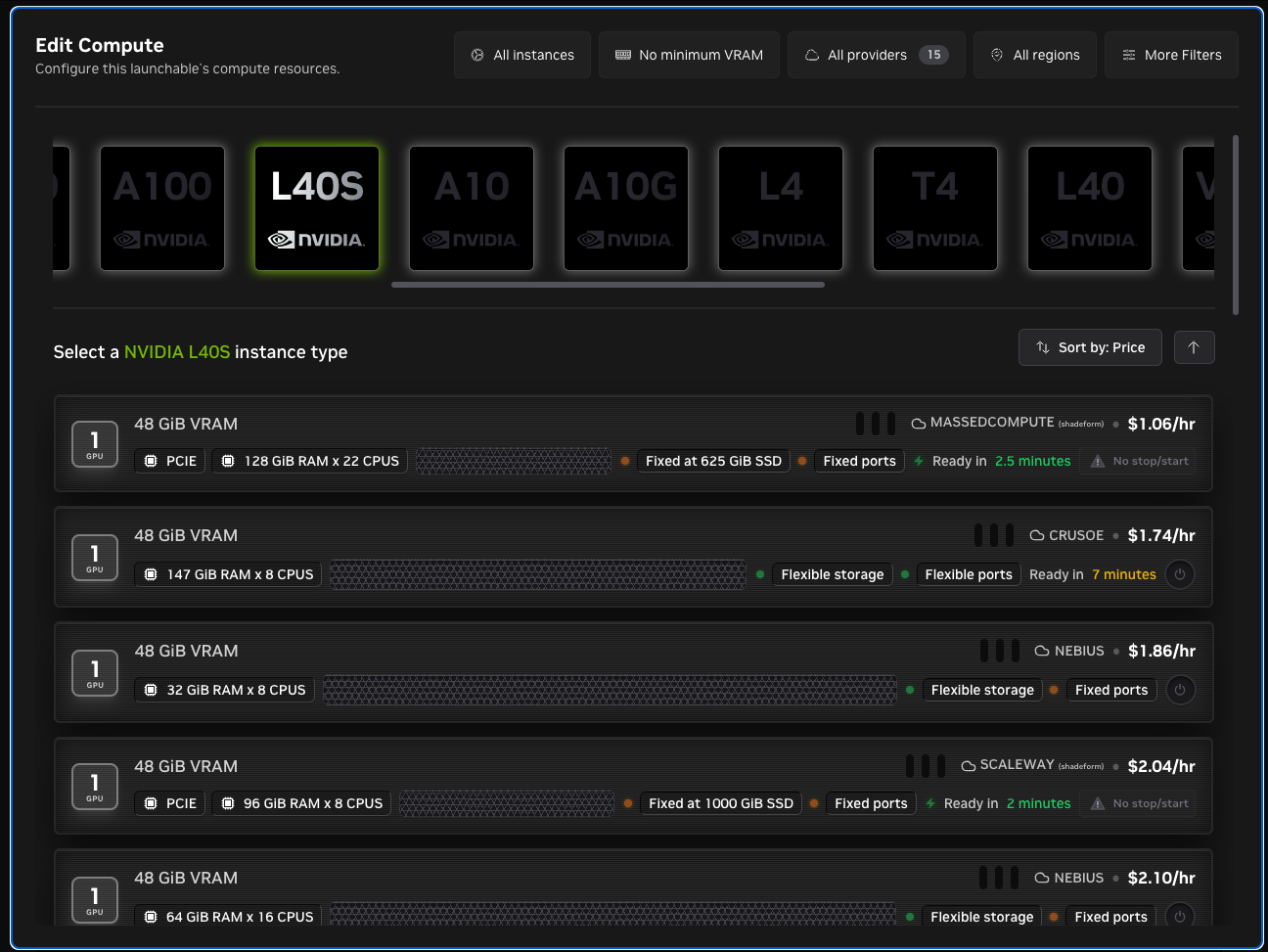
Select the instance hardware profile and cloud service provider in Brev.#
After the instance starts, keep the notebook’s HARDWARE_PROFILE value aligned with the selected machine. Brev controls the cloud VM shape, while HARDWARE_PROFILE controls the VSS deployment assumptions used by the notebook and orchestrator.
Agent model versus VSS models#
The notebook configures two different model surfaces:
NEMOCLAW_*variables configure the OpenClaw chat agent that operates VSS.VSS_LLM_*andVSS_VLM_*variables configure the LLM/VLM endpoints used by the deployed VSS services whendocker_generatecreates profile artifacts.
Notebook variables#
Required and provider selection values are set in Section 1.1 and Section 1.2.
Variable |
Default |
Description |
|---|---|---|
|
(blank) |
NVIDIA legacy API key. Required for |
|
|
Hardware profile applied by the orchestrator. Supported values are |
|
(blank) |
Required for the build.nvidia.com OpenClaw provider and propagated to generated VSS env when NVIDIA-hosted endpoints are used. |
|
(blank) |
OpenAI-compatible base URL for a cloud or local custom OpenClaw provider. When non-empty, the notebook selects |
|
(blank) |
Model ID for the OpenClaw chat agent. If blank on the build.nvidia.com path, the installer defaults to |
|
(blank) |
Bearer token for the custom OpenAI-compatible provider. Must be non-empty for custom provider mode, even when a local server ignores it. |
Advanced values are set in Section 1.3 or derived from the environment.
Variable |
Default |
Description |
|---|---|---|
|
|
NemoClaw installer pin. Section 3 reinstalls if the installed |
|
|
Enables OpenClaw webhooks and generates a random |
|
|
Webhook path under the OpenClaw dashboard forward. |
|
(blank) |
Remote LLM settings for the deployed VSS stack. Setting |
|
(blank) |
Optional deployed-VSS LLM thinking/behavior override. |
|
(blank) |
Key for deployed VSS remote LLM/VLM endpoints. Blank falls back to |
|
(blank) |
Remote VLM settings for the deployed VSS stack. Setting |
|
|
GPU index for the local LLM NIM on non-edge hardware profiles. |
|
|
GPU index for the local VLM NIM on non-edge hardware profiles. |
|
(blank) |
External host IP used by generated VSS URLs. Blank resolves from |
|
|
VSS checkout used by the notebook. |
|
|
Fallback NemoClaw source checkout used by |
|
|
Sandbox name to create or reuse. |
|
|
Variant overlay applied by the VSS OpenClaw plugin. The |
|
|
Source workspace template directory used by Section 4 verification. |
|
|
Bind host used when Section 6.1 starts the MCP server. |
|
|
Bind port used when Section 6.1 starts the MCP server. |
|
|
OpenClaw dashboard forward port used by the UI and webhook checks. |
MCP server environment#
The orchestrator MCP server reads credentials, hardware profile, remote VSS model endpoints, and device IDs at startup. In the notebook flow, Section 6.1 maps the notebook-facing VSS_* variables into the unprefixed MCP server environment variables before launching uv run nat mcp serve:
docker_generate then merges those values with the selected profile .env and any per-call env_overrides. For the full resolution order and tool payloads, see VSS Orchestrator MCP server.
Optional notebook cells#
Section 2.1 - pin Docker version#
Pins the tested Docker stack before Section 3 creates the sandbox:
Docker CE
29.4.3buildx
0.33.0Docker Compose
5.1.3containerd
2.2.3
Run this before Section 3 creates the OpenClaw sandbox. A Docker downgrade restarts dockerd and would disrupt live sandbox containers if it ran later in the notebook. The cell runs apt-mark hold so later package operations do not drift the instance back to a newer Docker stack before Section 6 runs.
Section 4 - verify sandbox, policy, skills, and webhooks#
Runs additional checks against the live sandbox after Section 3:
Sandbox phase, namespace, and id.
Active policy metadata (status, version, hash).
OpenClaw webhooks reachability when enabled.
openclaw plugins doctoroutput.Installed non-bundled skills from
openclaw skills list --json.Workspace
.mdfiles copied by the plugin install.
Section 7 - verify host reachability from the sandbox#
Run only after VSS is deployed. The probe uses nemoclaw <sandbox> connect and validates host port reachability through host.openshell.internal. Do not replace this with docker exec because that can use a different path and produce misleading results.
The notebook reports one of the following results for each checked port:
REACHABLE- an HTTP service answered.404and non-policy403responses still count because they prove a service is listening, even ifGET /is not a valid or authorized route.NOT_REACHABLE- the port is blocked by policy, no service is listening, DNS failed, the connection failed, or the request timed out. Check theNOTEcolumn for the reason.
OpenClaw webhooks#
When OPENCLAW_HOOKS_ENABLED is true, the notebook generates a random OPENCLAW_HOOKS_TOKEN and configures OpenClaw webhooks at OPENCLAW_HOOKS_PATH. Section 4 sends a local authenticated POST to http://127.0.0.1:18789/hooks/agent to confirm acceptance.
Disable webhooks by setting:
OPENCLAW_HOOKS_ENABLED = False
Artifacts and logs#
MCP server log:
<VSS_REPO_DIR>/.orchestrator-artifacts/vss_orchestrator_mcp.log.Generated env artifacts:
<output_dir>/generated.<docker_compose_id>.dry-run.env.Generated compose artifacts:
<output_dir>/compose.resolved.<docker_compose_id>.dry-run.yml.MCP config:
deploy/docker/scripts/vss_orchestrator_mcp_config.yml.The recorded MCP PID is kept in the notebook’s Python state as
VSS_ORCHESTRATOR_MCP_PIDand reused by Section 6.1 to stop a stale server before relaunching.